|
| EXAMPLE PROGRAMS |
EXAMPLE PROGRAMS FOR MODELS IN DIFFERENT SETS | | |
| | |
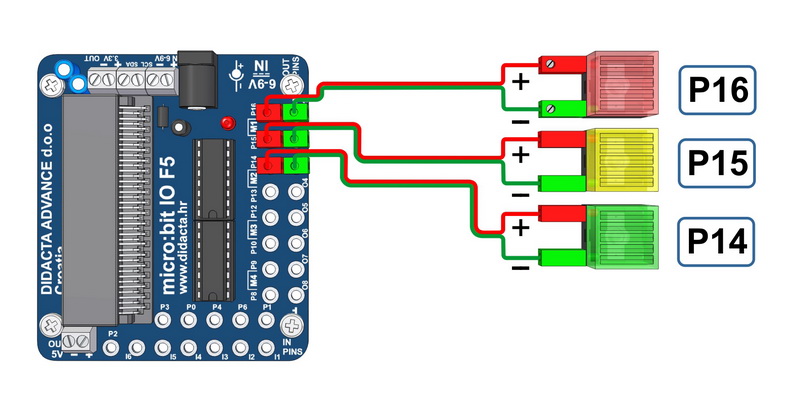
| TRAFFIC LIGHTS (BASIC / ROBOTIC set) |  | | |
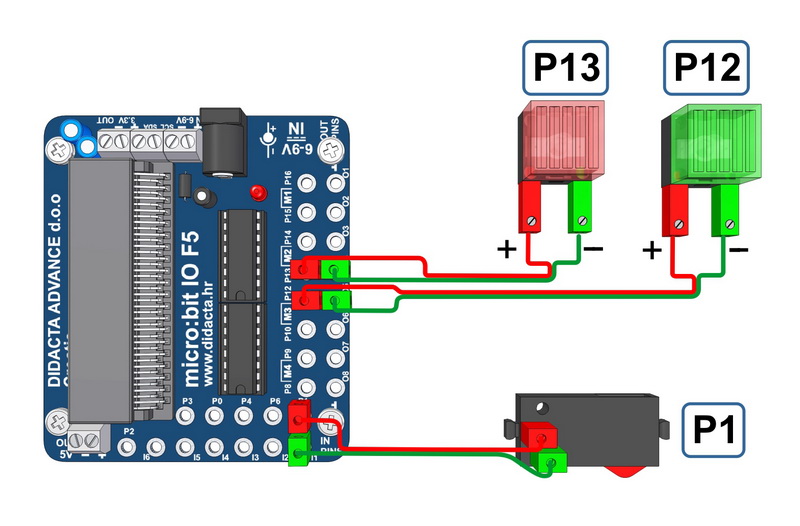
| TRAFFIC LIGHTS FOR PEDESTRIANS (BASIC / ROBOTIC set) | | | |
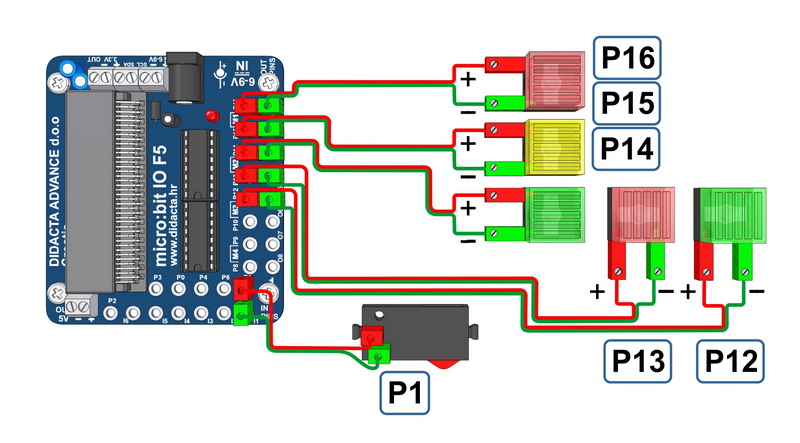
| TRAFFIC LIGHTS FOR CARS AND PEDESTRIANS (BASIC / ROBOTIC set) | | | |
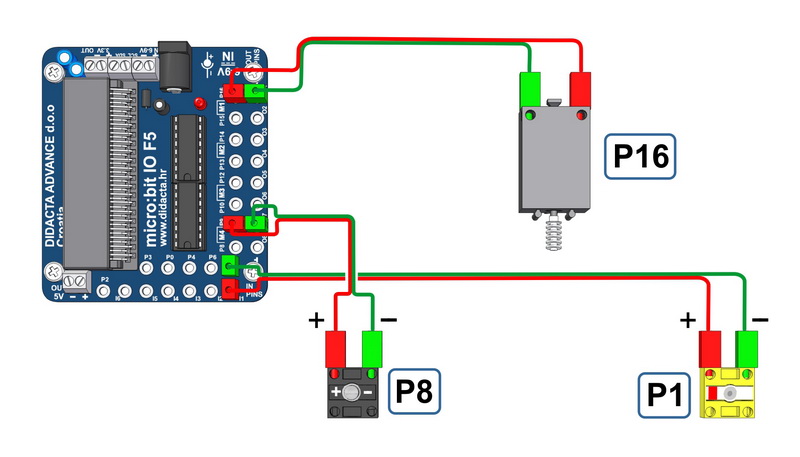
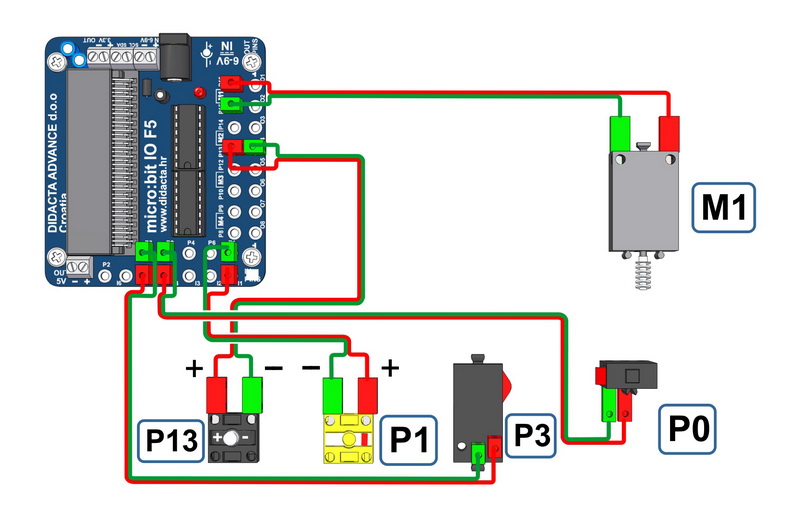
| HAND DRYER (BASIC / ROBOTIC set) | | | |
| BARRIER (BASIC / ROBOTIC set) | | | |
| BARRIER WITH SIGNAL LIGHT (BASIC / ROBOTIC set) | | | |
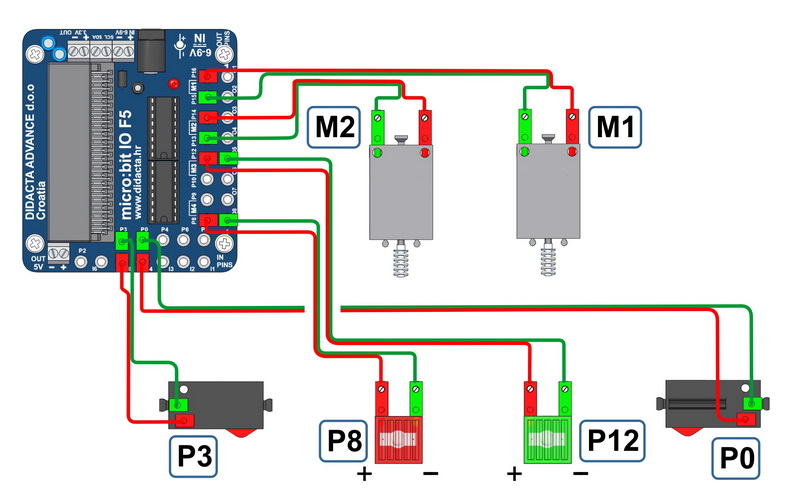
| (1) NAVIGATE OBSTACLES USING TOUCH SENSOR (ROBOTIC / CAR set) | | | |
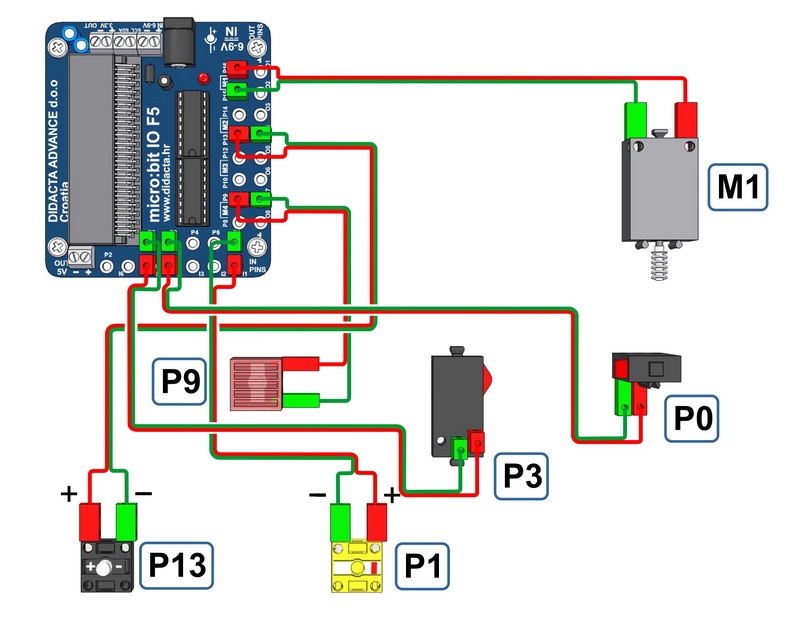
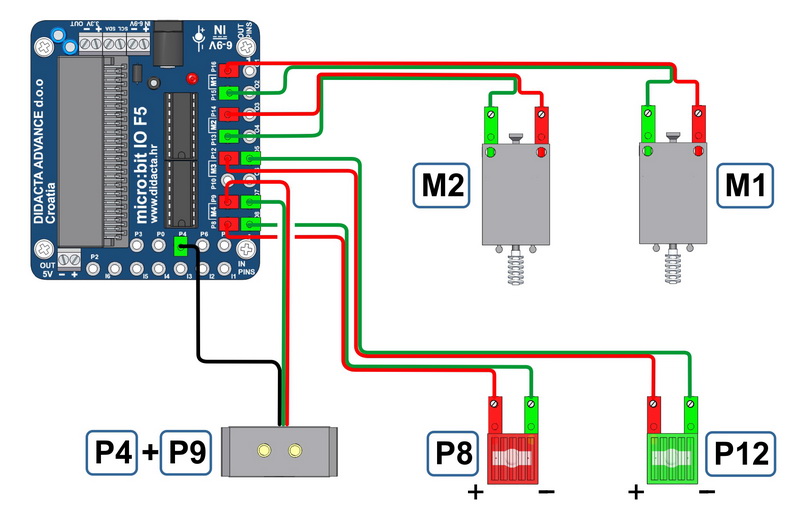
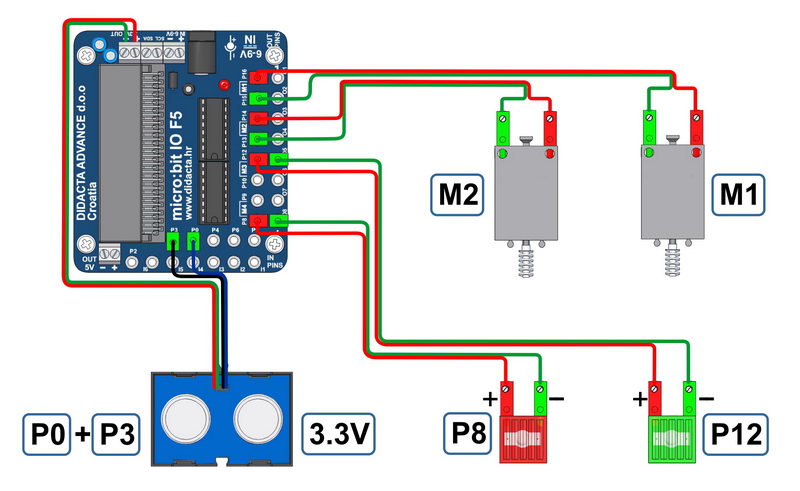
| LIGHT SOURCE SEEKING USING PHOTO SENSORS (ROBOTIC / CAR set) | | |
| | |  | | | | | | | Wiring shematics is on page 29. in user manual with small changes in wirin PHOTO sensors. | |
| | | | | microbit-08.zip | |
| |
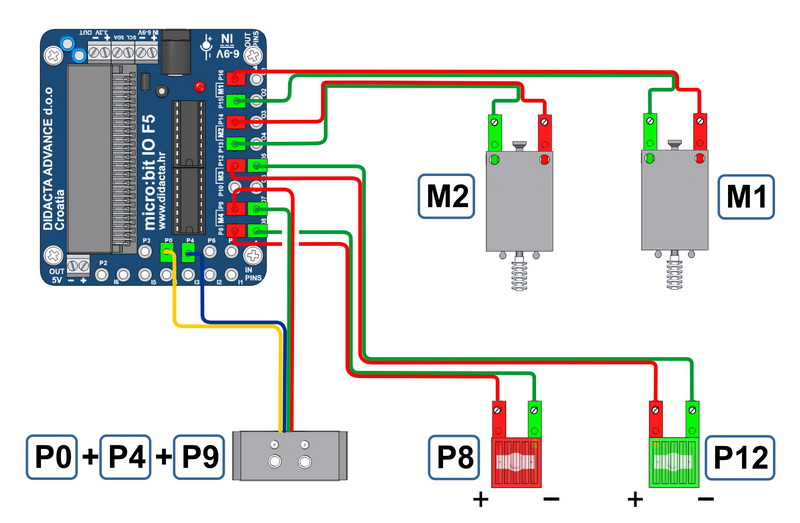
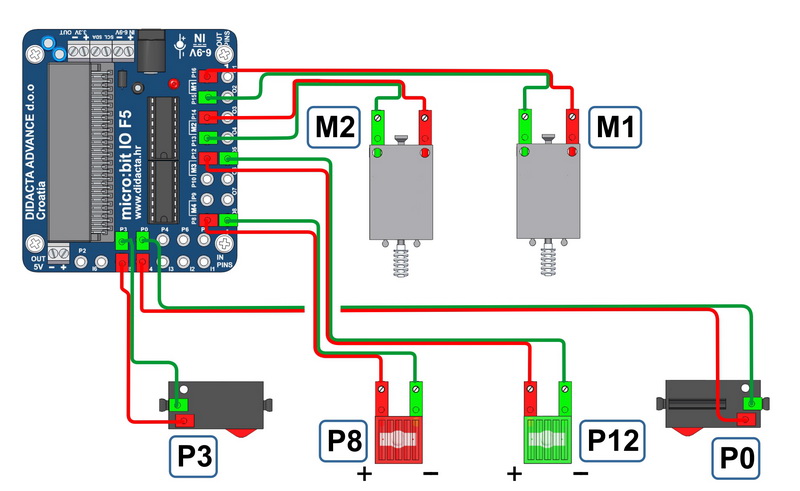
| PATH TRACING WITH INFRARED SENSOR (ROBOTIC / CAR set) | |
|
|
|
|
|
|
|
|
|