









 |
|
fischertechnik
fischertechnik kompletifischertechnik dijeloviTrening modeli 9VTrening modeli 24V
ostali proizvodi
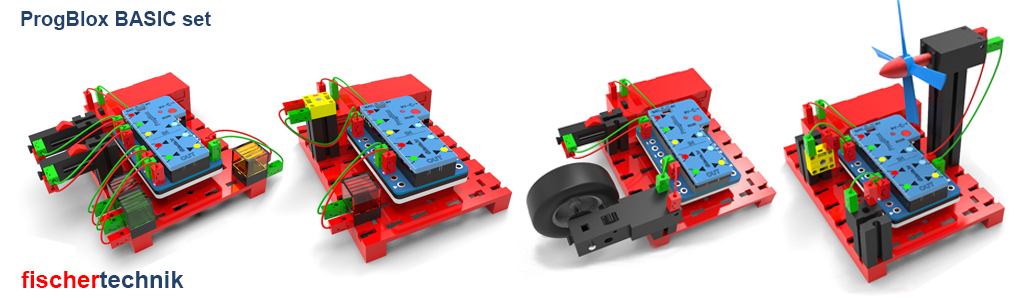
Ostali senzori i dijeloviModeli za rad u nastaviOstali modeli u nastaviModeli za robotikuProgBlox
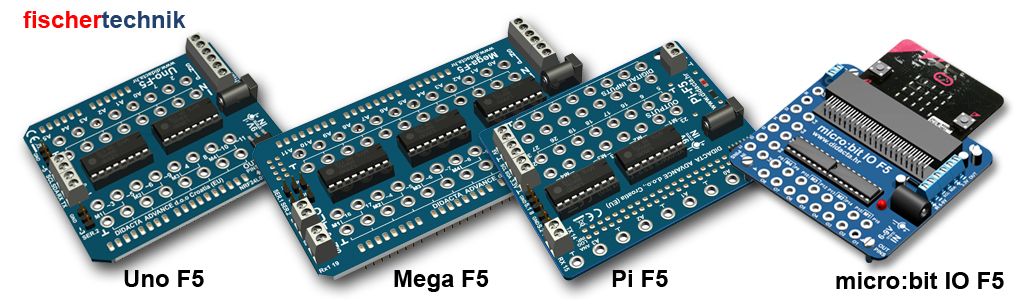
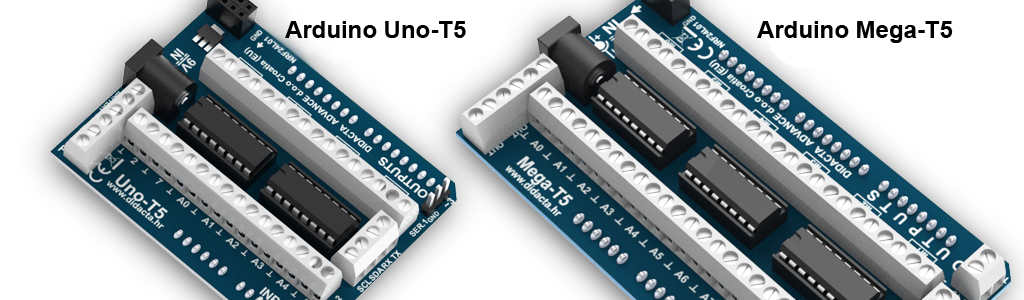
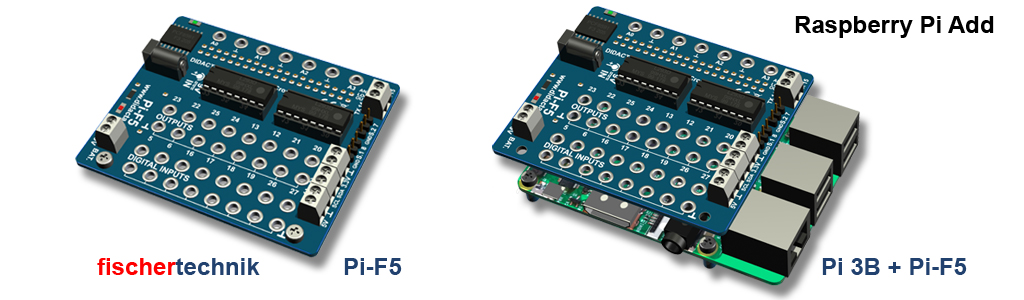
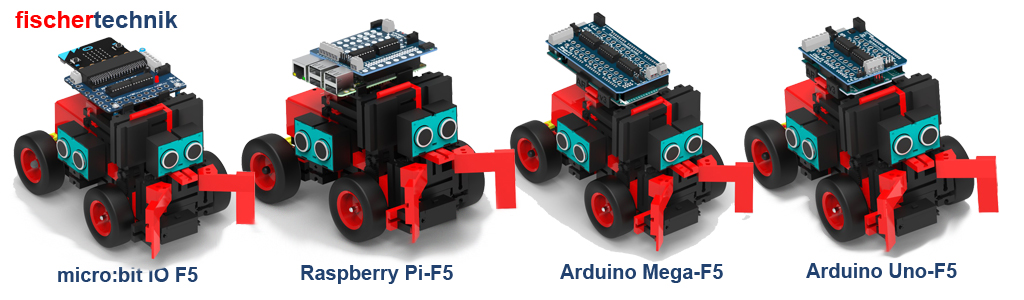
BBC micro:bit Arduino Uno/Mega Raspberry Pi
PRETRAŽI KATALOG
pregled PDF kataloga
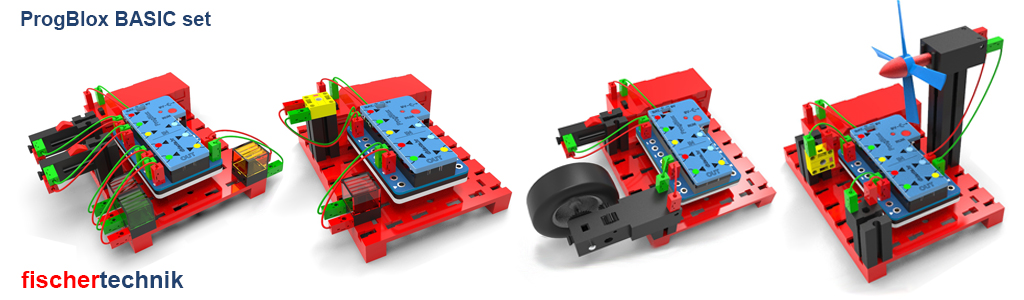
education 2022toy 2023trening 2021ProgBlox
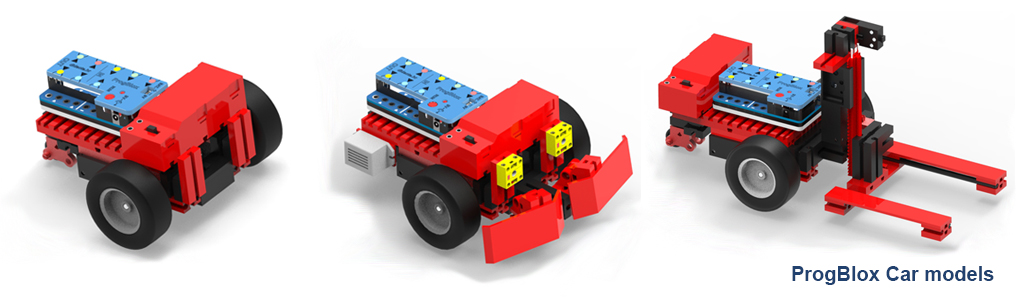
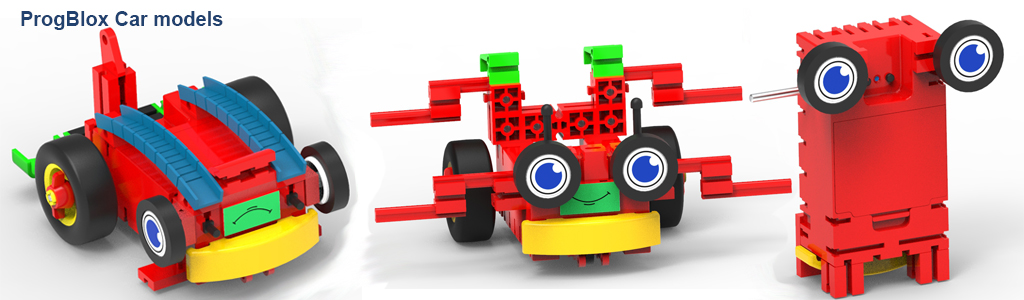
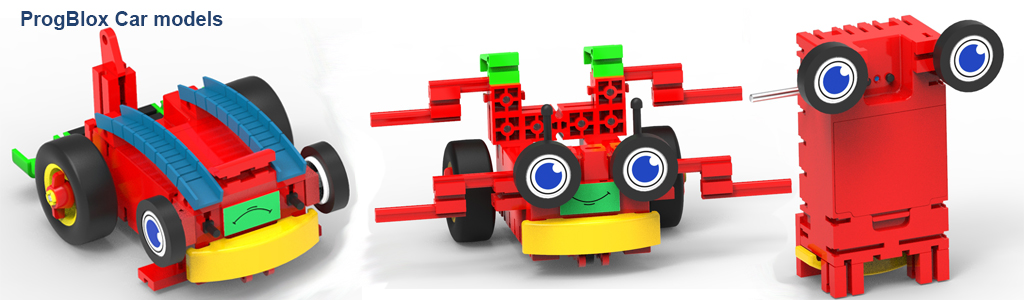
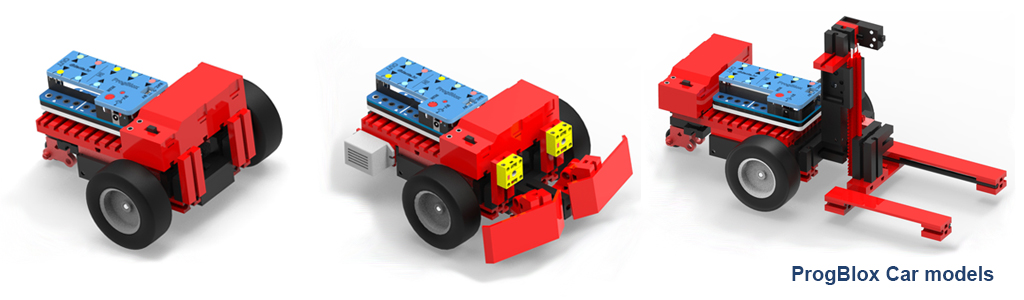
ProgBlox Car setProgBlox Plus setProgBlox PrimjeriTX / TXT / TXT 4.0
RP Coding - TXT 4.0RoboPRO - TXT/TX interf.RoboBUBI
RoboBUBI - RoboPRORoboBUBI - RoboBUBIRoboBUBI - Arduino C++micro:bit
micro:bit - Pythonmicro:bit - MakeCodemicro:bit ROBOTIC SETmicro:bit AD - MakeCodemicro:bit AD - PythonARDUINO
display AD - Arduino C++Arduino Uno - C++Arduino Mega - C++OpenPLC
Arduino - OpenPLCRaspberry - OpenPLCRaspberry
Raspberry - Python |