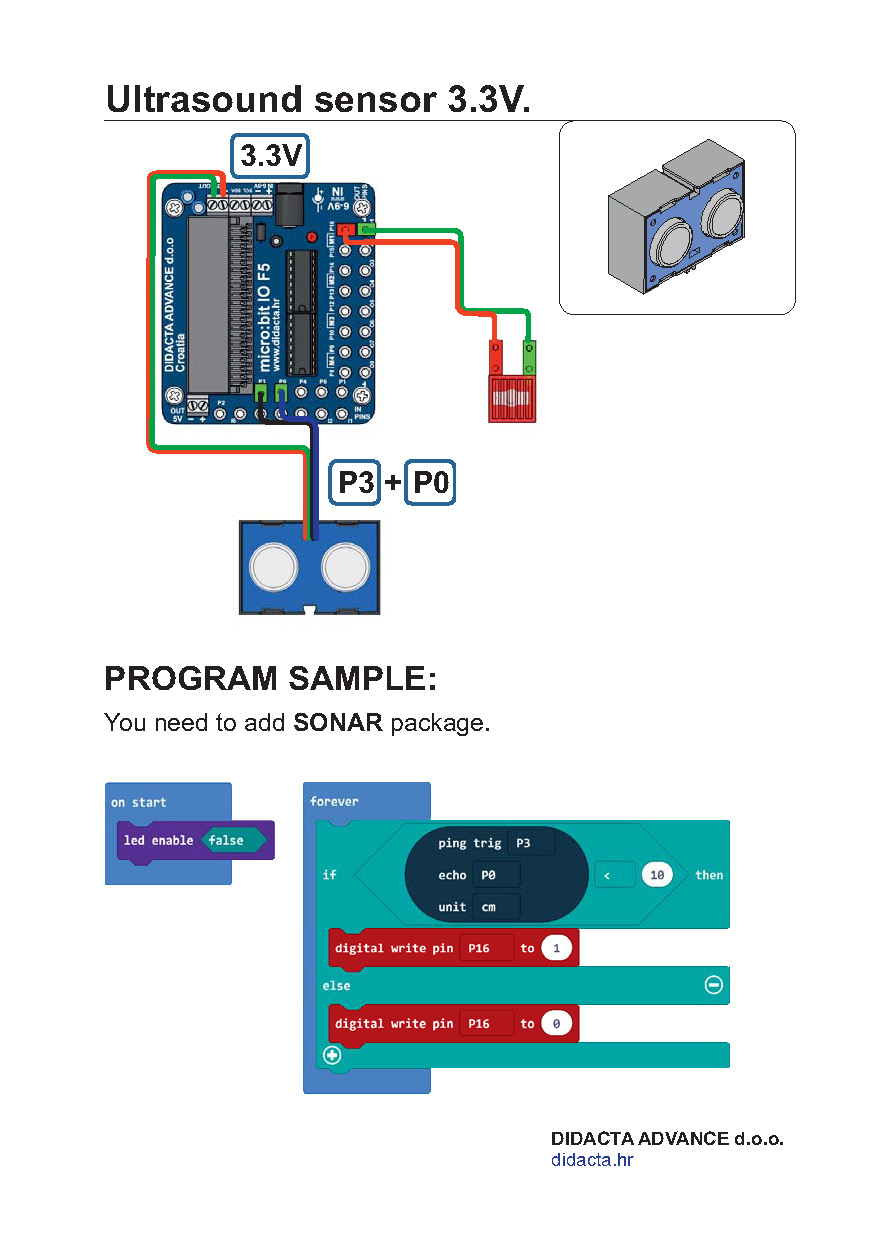
| ULTRAZVUČNI SENZOR 3.3V za micro:bit IO sučelje |
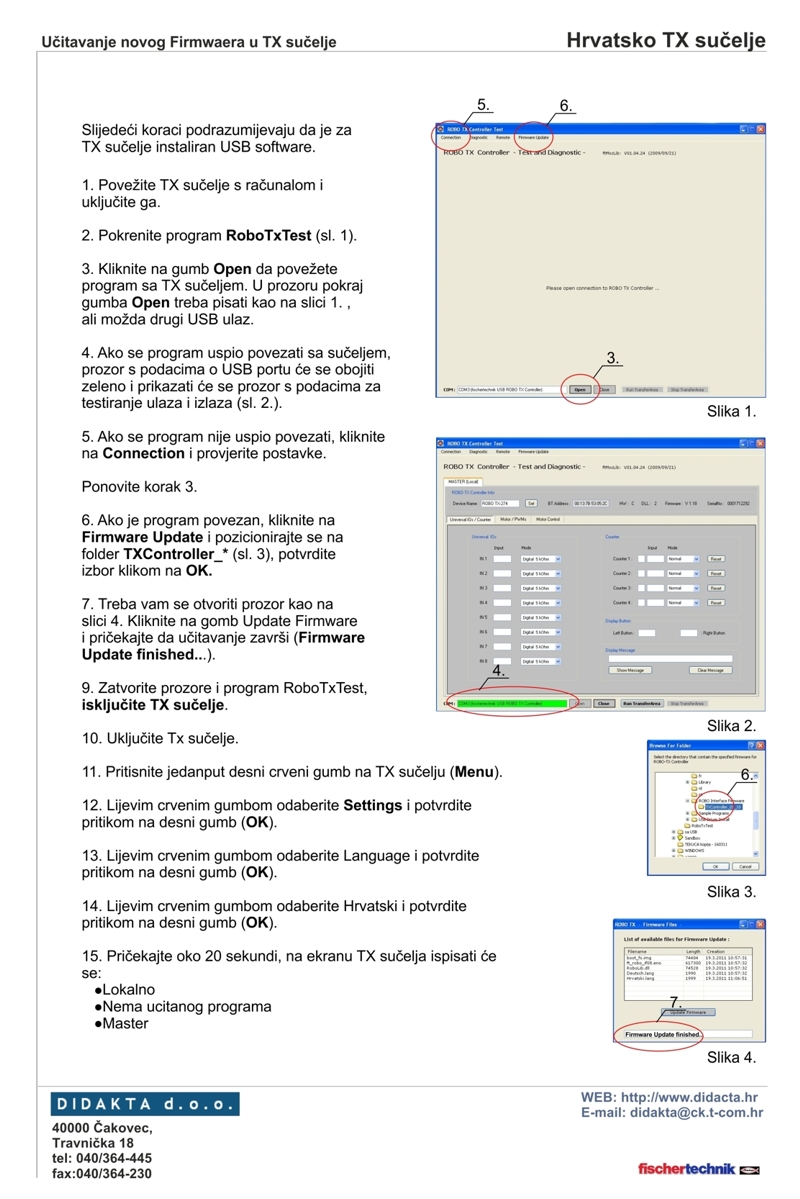
|  | Skinite pakiranu datoteku i raspakirajte ju u želejni folder. Otvorite pdf upute koje se nalaze u paketu i izvodite korake kao u uputama. | | | HR_Firmware.rar | |
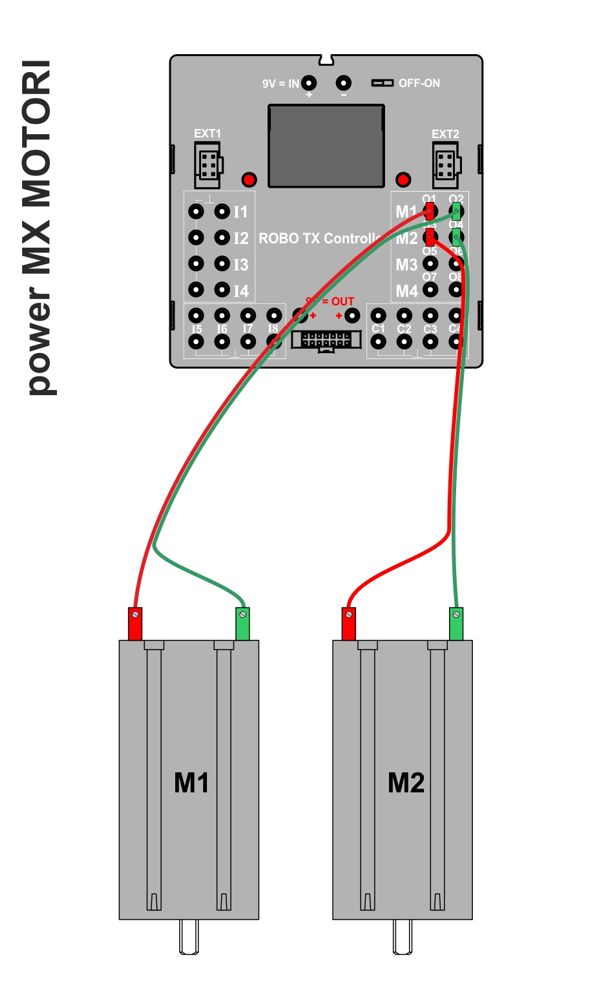
| | Spajanje XM motora (power) na TX / TXT sučelje |
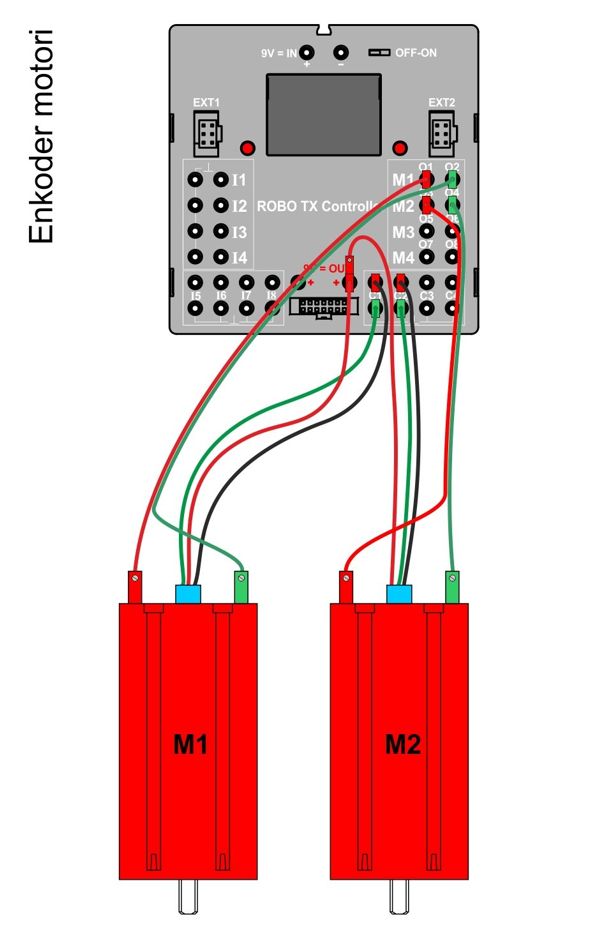
| | Spajanje ENKODER motora na TX sučelje |
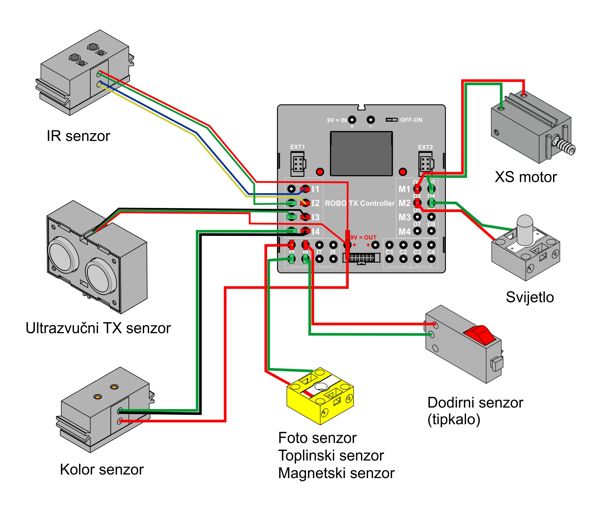
| | Spajanje svih senzora na ROBO TX sučelje |
| |  |
|
|
|
|