Na početku uputa objašnjene su funkcije i način rada tableta i robotskog vozila. Objašnjene su osnovne funkcije programiranja uz primjere za LED svjetla. Prvih jedanaest programskih primjera prikazuje način slaganja programa i sve kontrole vezane uz senzore koji se nalaze na robotskom vozili. Primjeri od dvanaest do dvadeset jedan pokazuju mogućnosti kontrole vozila putem senzora.
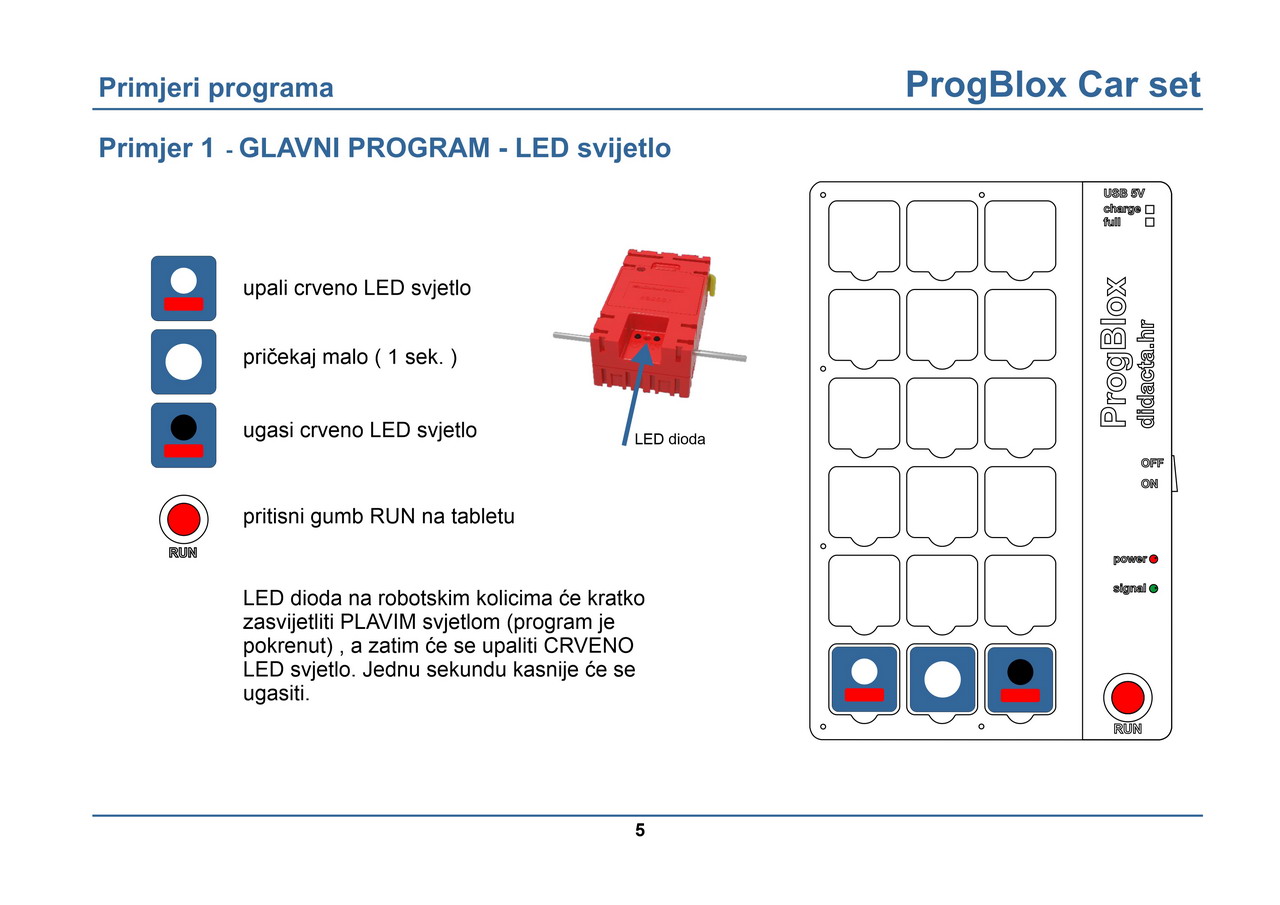
Primjer 01 - upali crveno LED svjetlo
Prikaz kompletne procedure od uključivanja tableta i vozila. Zatim se slaže program koji pokrečemo putem gumba RUN. Nakon završene viježbe program trebamo obrisati zato da se ne pomiješa sa novim programom.
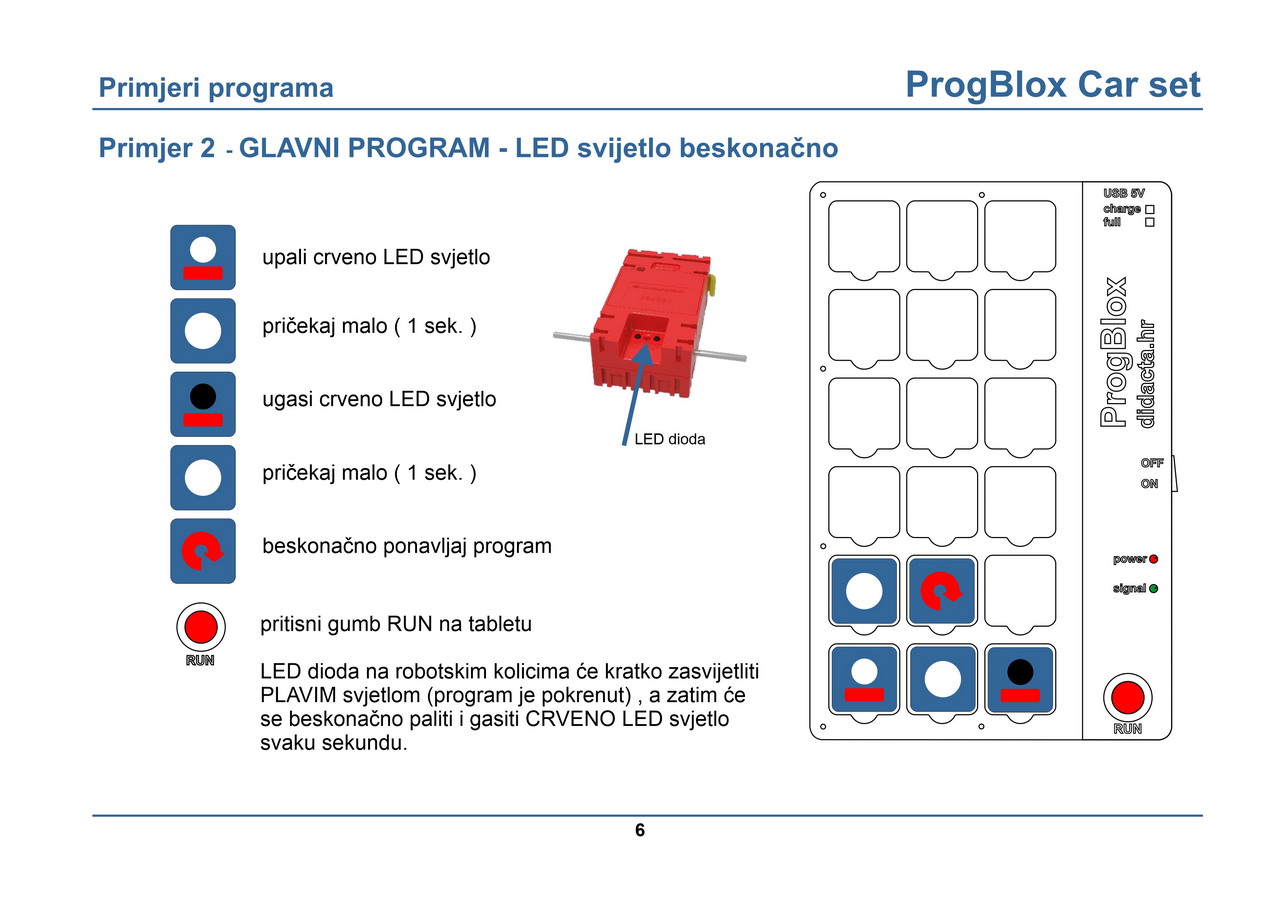
Primjer 02 - pali i gasi crveno LED svjetlo beskonačno
Primjer beskonačne petlje - glavni program. Beskonačno se pali i gasi crveno LED svijetlo.
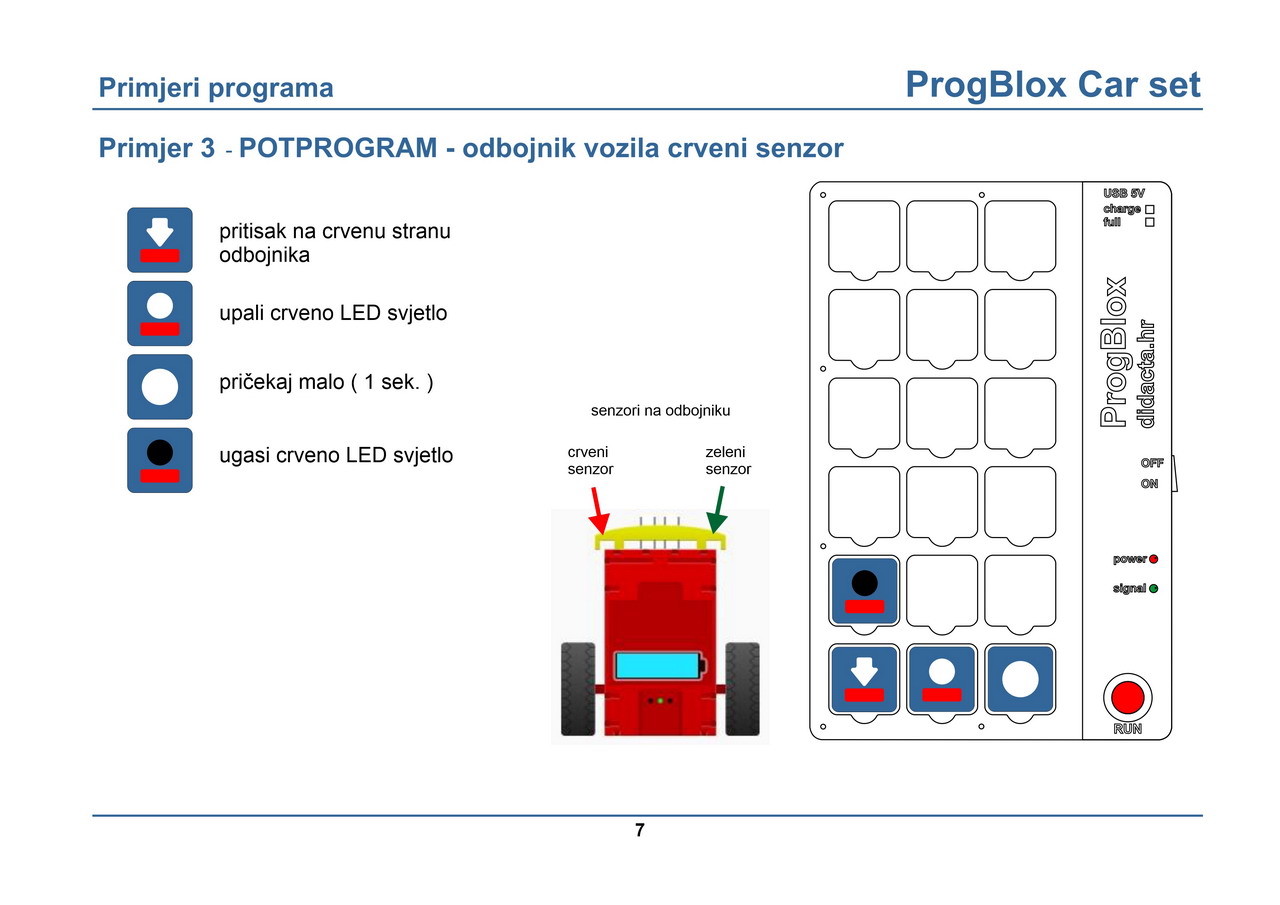
Primjer 03 - senzori odbojnika - crveni
Kontrola senzora na odbojniku. Senzore na odbojniku smo označili kao CRVENI i ZELENI. Primjer prikazuje paljenje crvenog LED svijetla pritiskom na CRVENU stranu odbojnika.
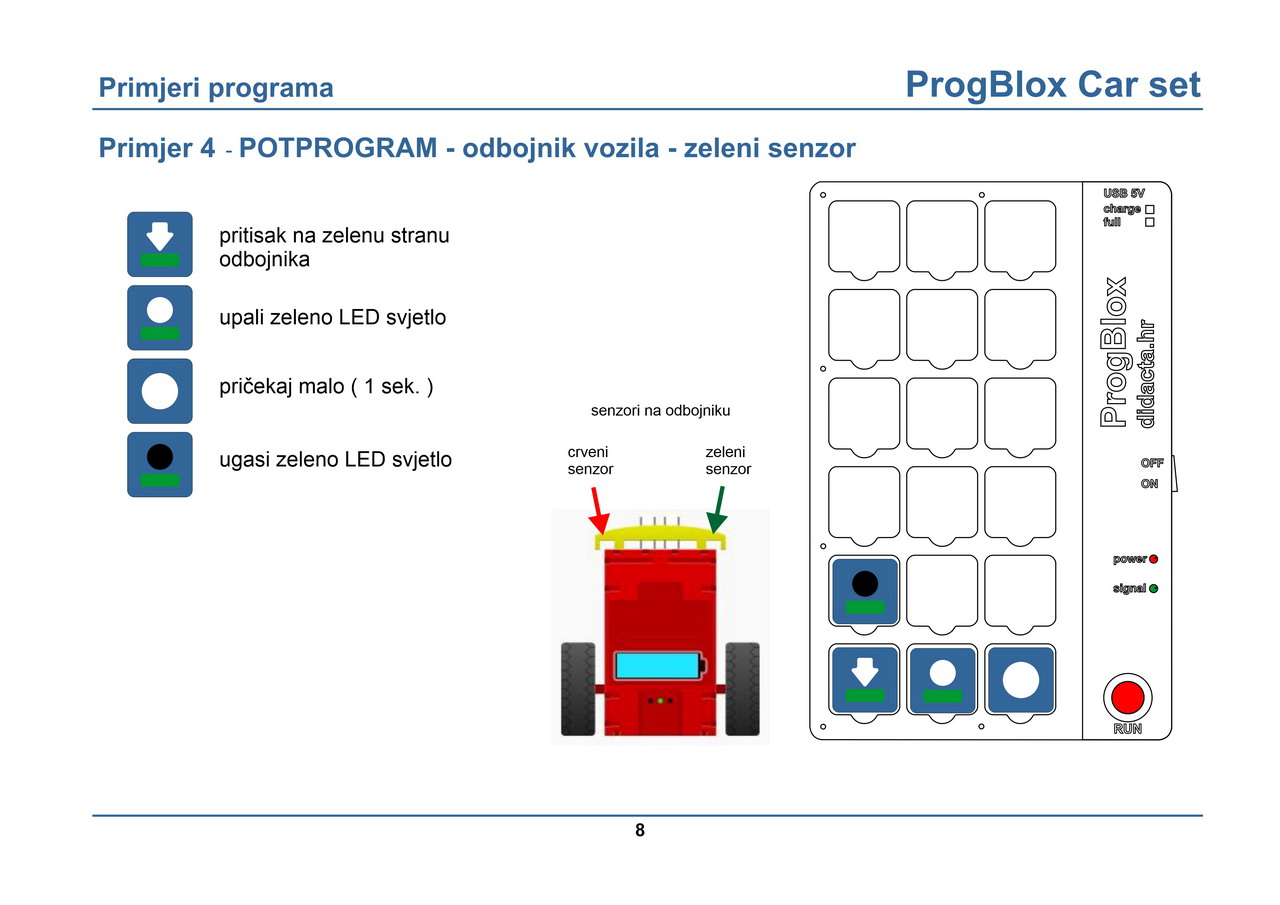
Primjer 04 - senzori odbojnika - zeleni
Kontrola senzora na odbojniku. Senzore na odbojniku smo označili kao CRVENI i ZELENI. Primjer prikazuje paljenje zelenog LED svijetla pritiskom na ZELENU stranu odbojnika.
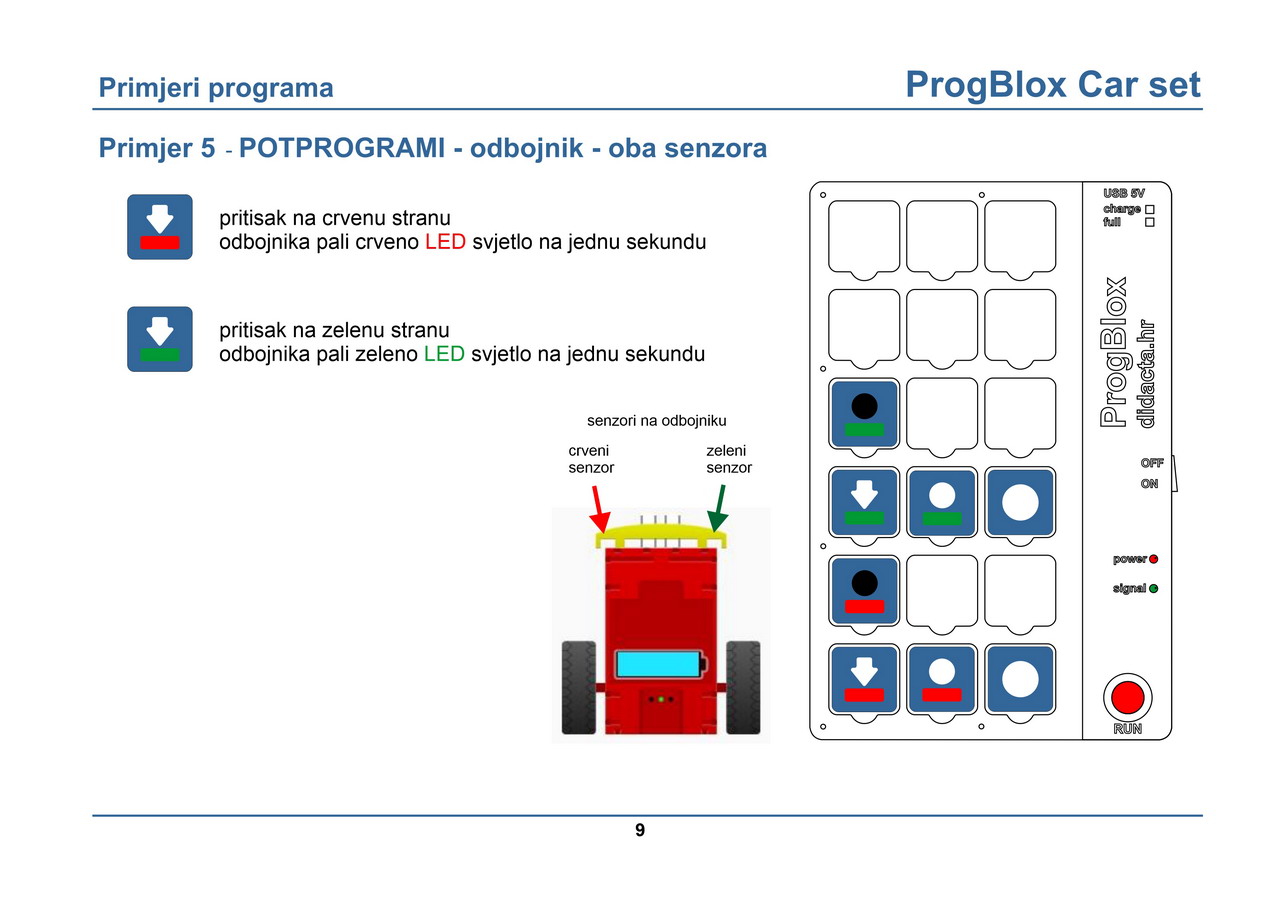
Primjer 05 - senzori odbojnika - zeleni i crveni
Kontrola senzora na odbojniku. Senzore na odbojniku smo označili kao CRVENI i ZELENI. Primjer prikazuje paljenje zelenog LED svijetla pritiskom na ZELENU stranu odbojnika i crvenog LED svijetla pritiskom na CRVENU stranu odbojnika.
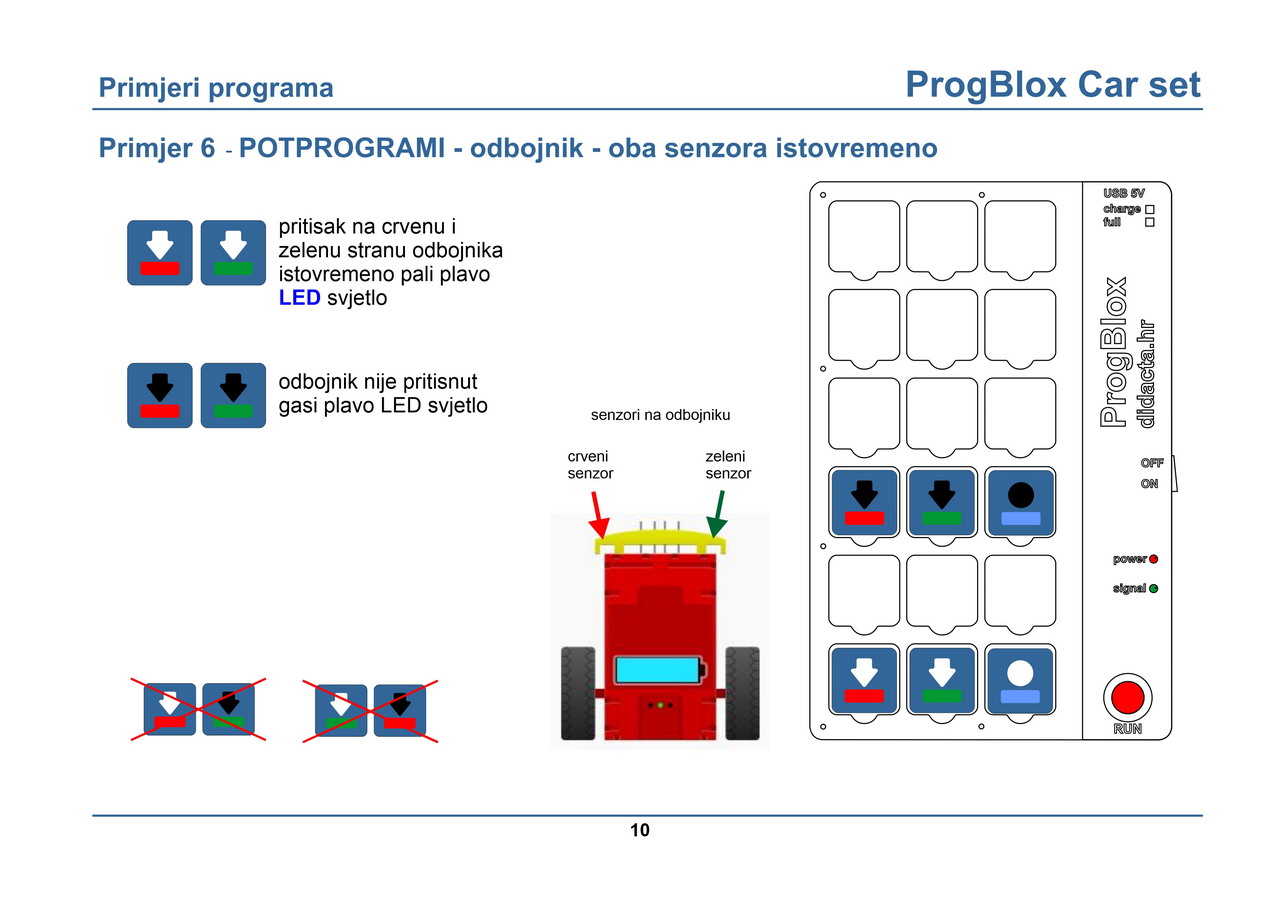
Primjer 06 - senzori odbojnika - oba senzora istovremeno
Kontrola senzora na odbojniku. Senzore na odbojniku smo označili kao CRVENI i ZELENI. Primjer prikazuje paljenje plavog LED svijetla pritiskom na ZELENU i CRVENU stranu odbojnika istovremeno.
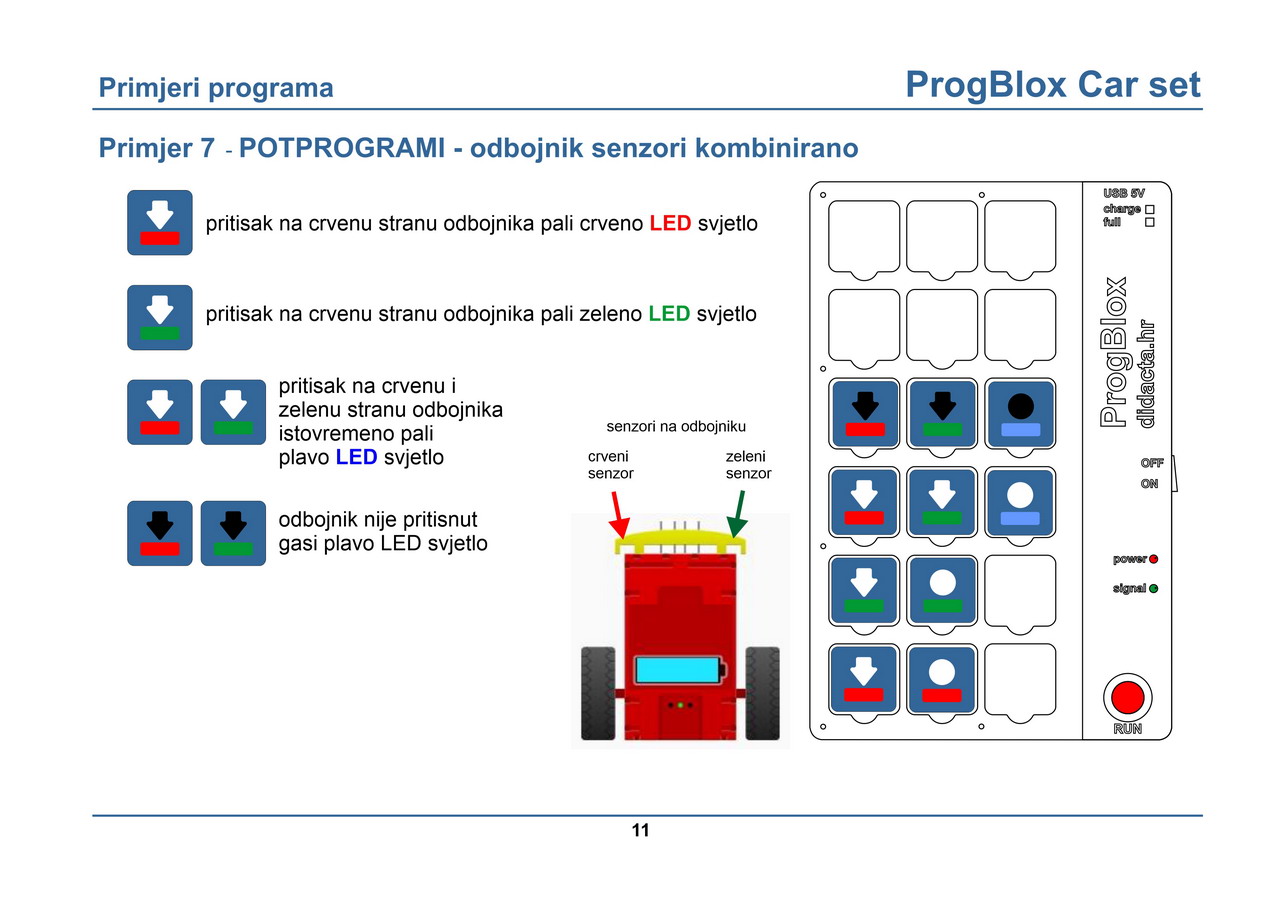
Primjer 07 - senzori odbojnika - kombinacije
Kontrola senzora na odbojniku. Senzore na odbojniku smo označili kao CRVENI i ZELENI. Primjer prikazuje moguće kombinacije kontrole senzora odbojnika, kad su pritisnuti istovremeno ili svaki zasebno.
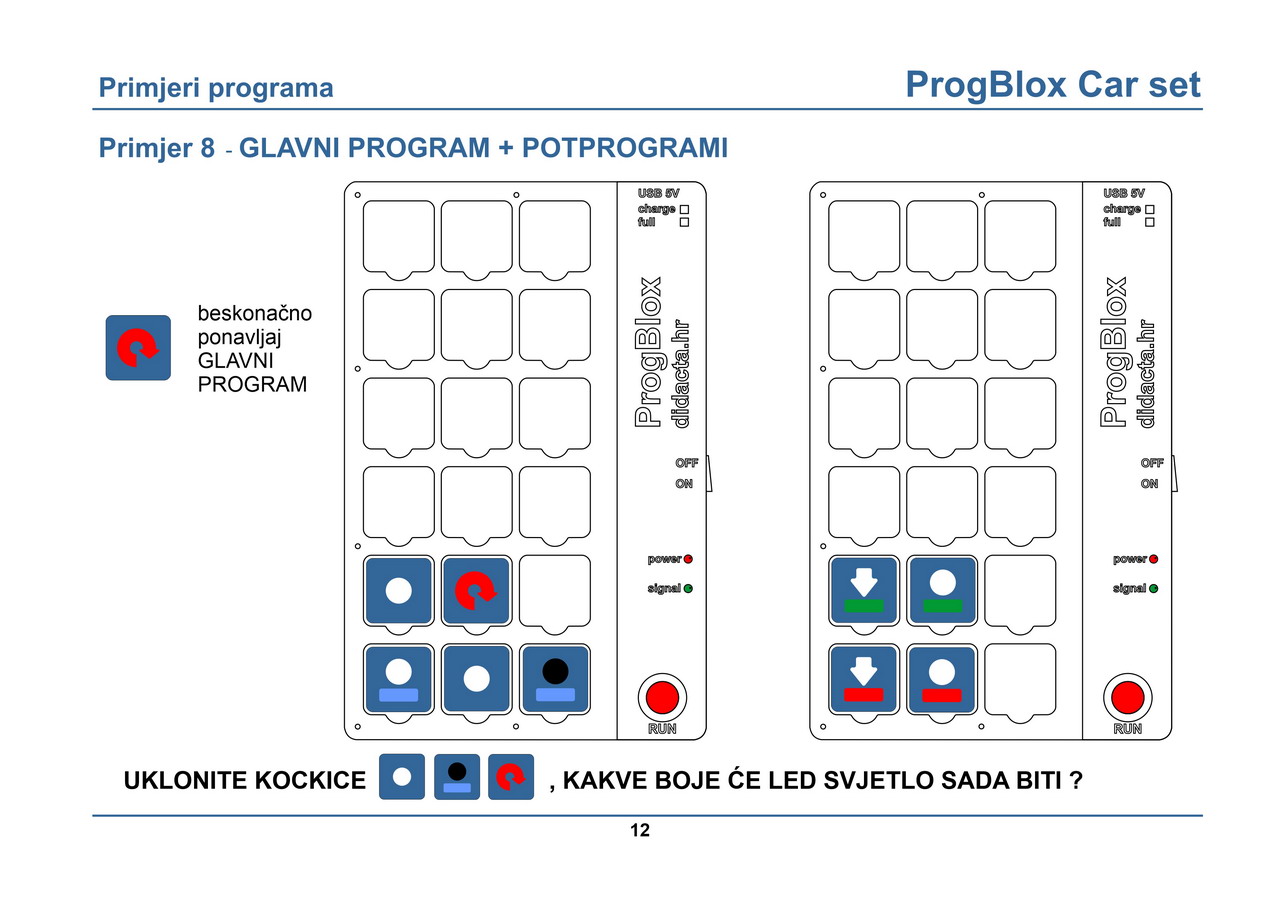
Primjer 08 - glavni program i potprogrami
Primjer pokazuje kombinaciju glavnog programa koji radu u beskonačnoj petlji ( pali se i gasi plavo LED svjetlo ) i kontrolu senzora na odbojniku. Pritiskom na crvenu stranu odbojnika pali se crveno LED svijetlo, a pritiskom na zelenu stranu odbojnika zeleno LED svjetlo.
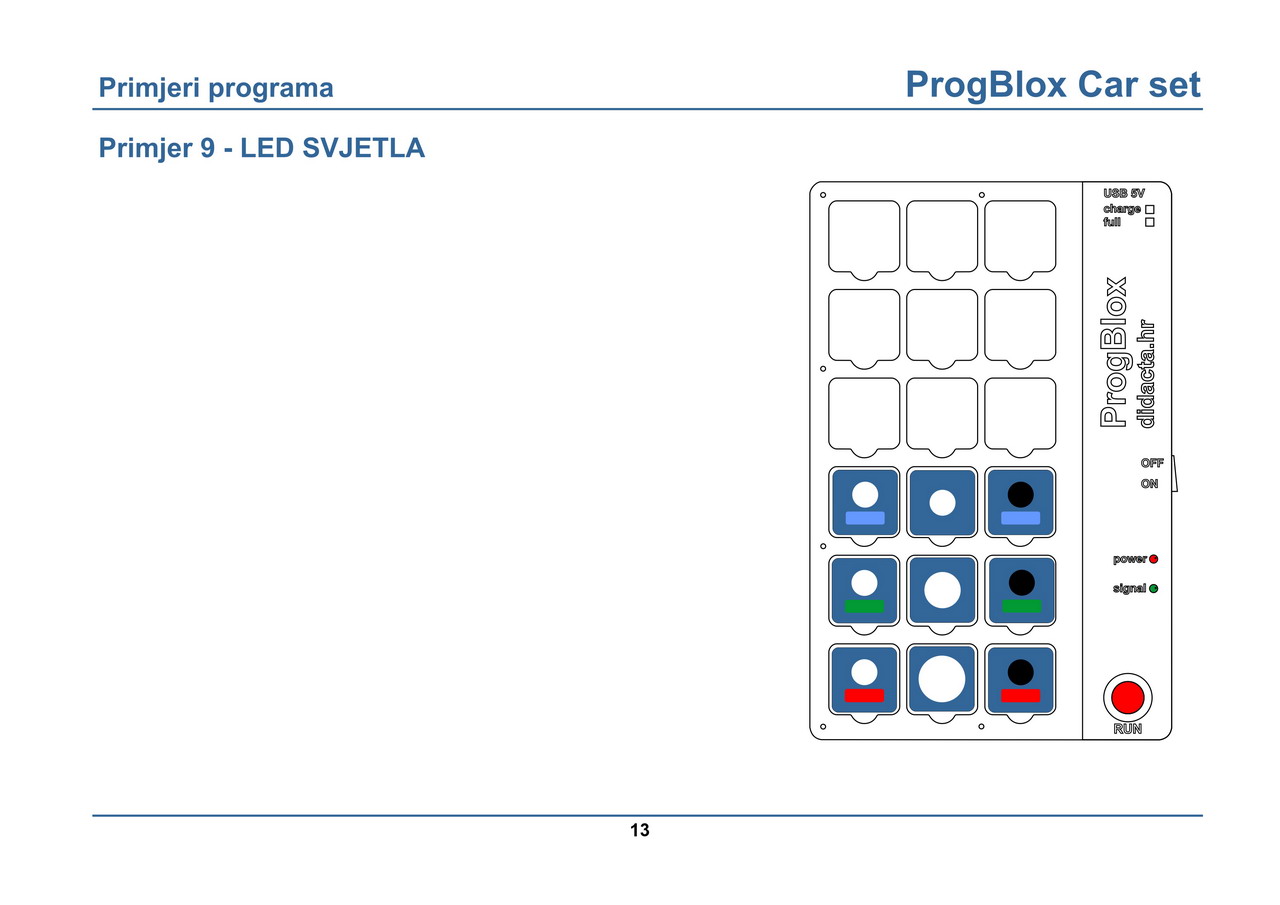
Primjer 09 - LED svijetla
Primjer paljenja različitih LED svjetla sa različitim vremenskim trajanjem pritiskom na gum RUN.
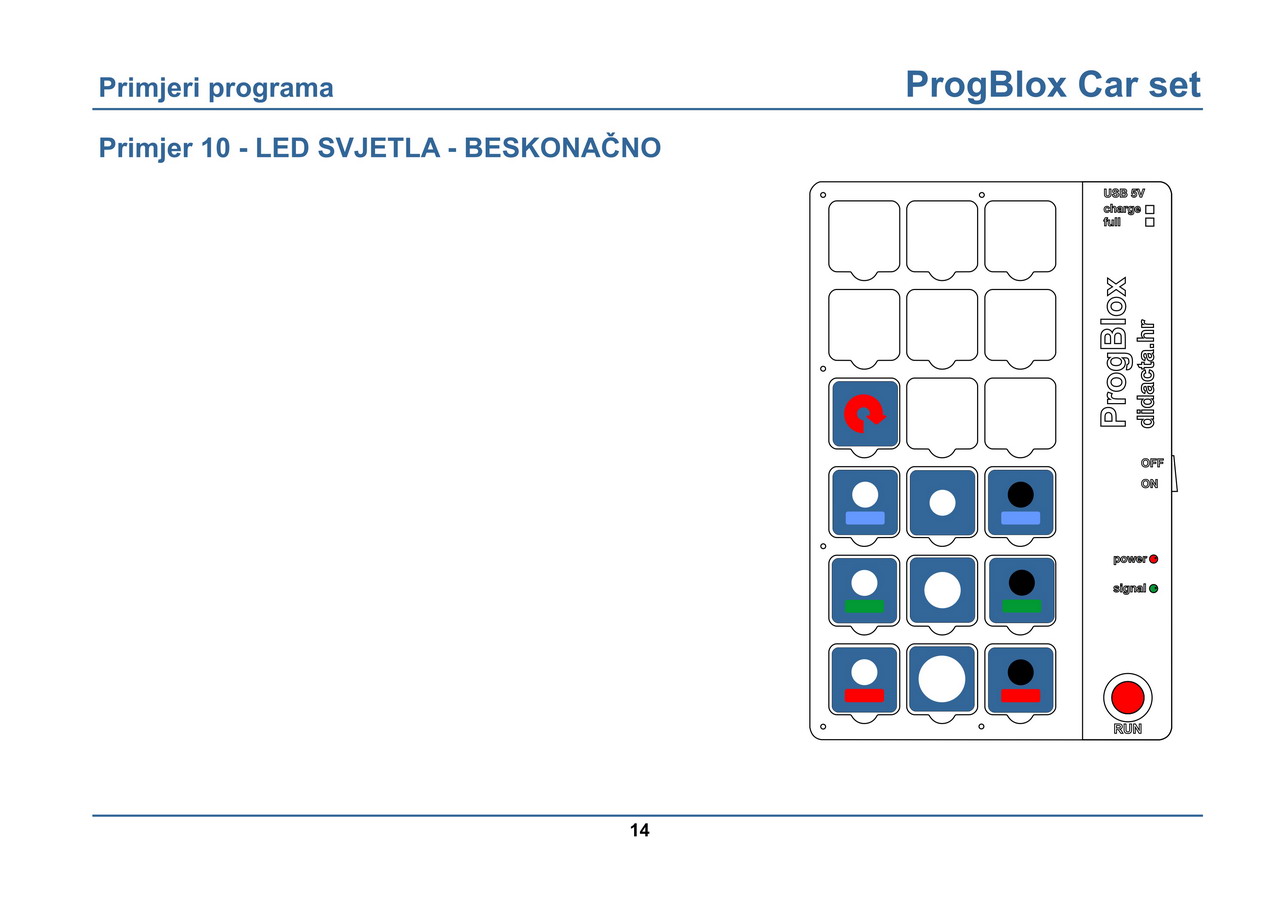
Primjer 10 - LED svijetla - beskonačno
Primjer paljenja različitih LED svjetla sa različitim vremenskim trajanjem koji se beskončno ponavlja.
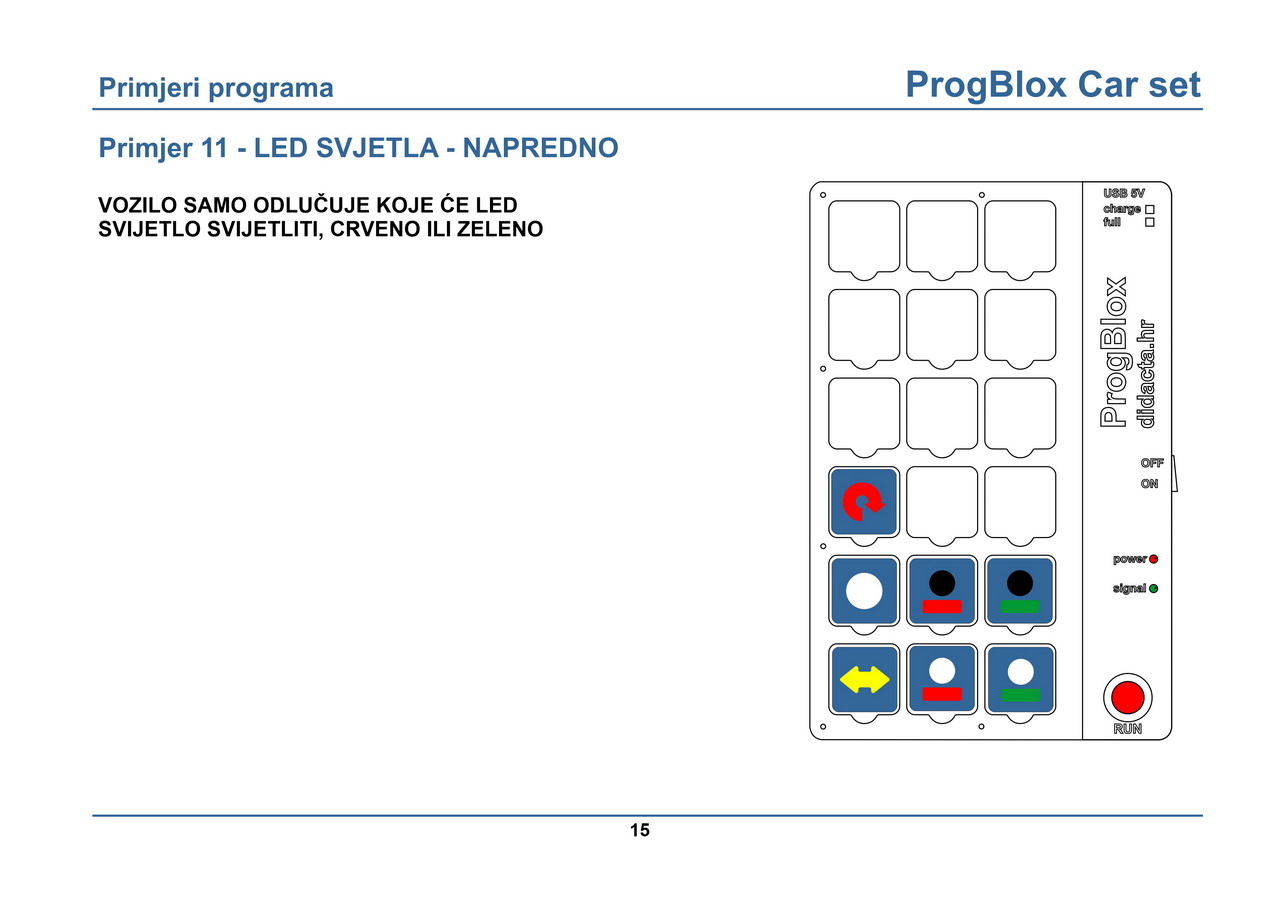
Primjer 11 - LED svjetla - NAPREDNO
Primjer paljenja različitih LED svjetla prema odabiru robotskog vozila uporabom naredbene kockice "ODLUKE" ( random ). Odabir može biti samo između dvije naredbene kocke koje se, u redosljedu, nalaze iza naredbene kocke odluke.
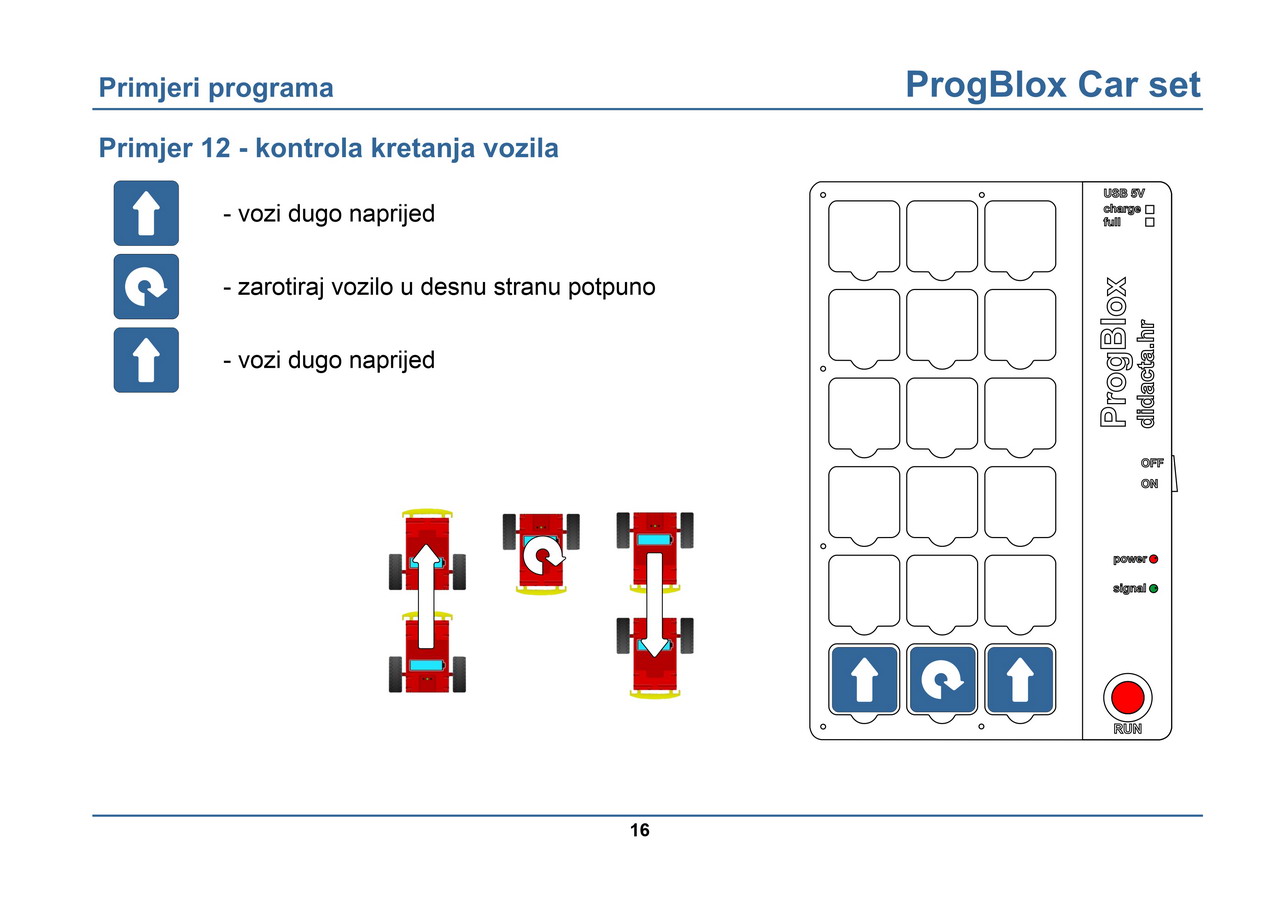
Primjer 12 - kontrola robotskog vozila 1
Primjer pokazuje nekoliko komandi za kontrolu kretanja robotskog vozila. Preciznost izvođenja određenih radnji ( skretanja ) može biti različita jer ovisi o stanju napunjenosti baterija.
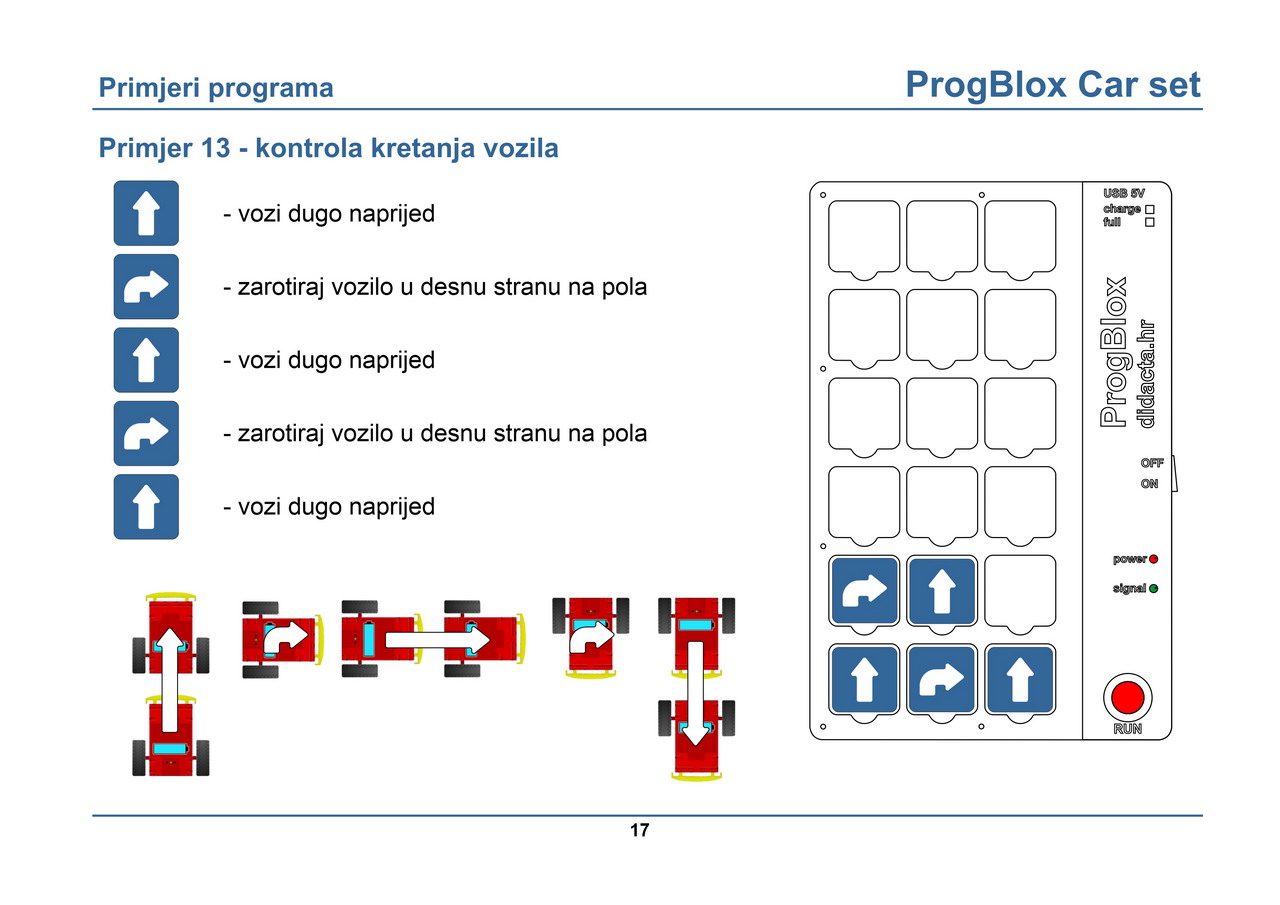
Primjer 13 - kontrola robotskog vozila 2
Primjer pokazuje nekoliko komandi za kontrolu kretanja robotskog vozila. Preciznost izvođenja određenih radnji ( skretanja ) može biti različita jer ovisi o stanju napunjenosti baterija.
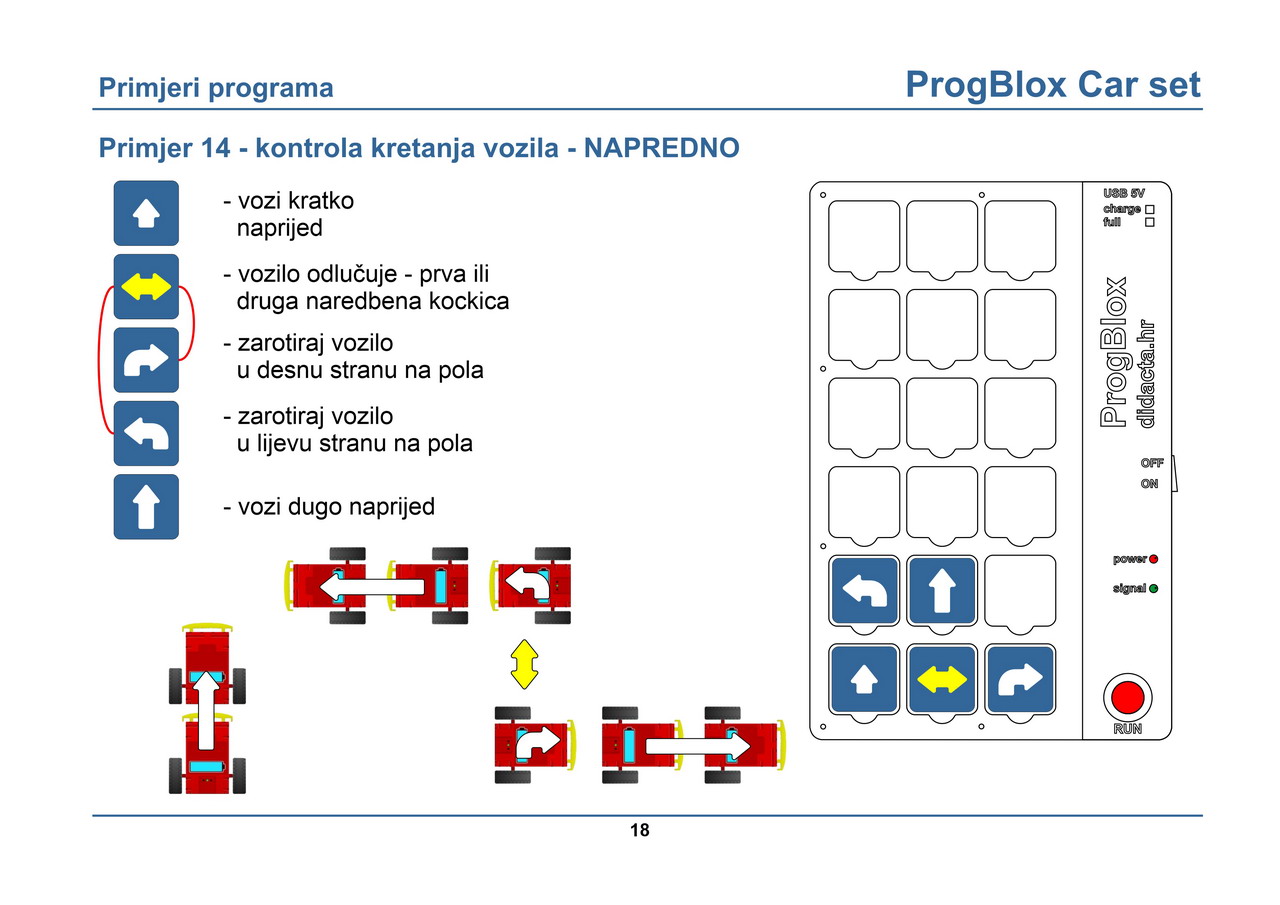
Primjer 14 - kontrola robotskog vozila - NAPREDNO
Primjer pokazuje nekoliko komandi za kontrolu kretanja robotskog vozila. Ovaj primjer pokazuje način korištenja naredbene kockice "ODLUKE" u kontroli robotskih kolica. Robotsko vozilo odlučuje u koju će stranu krenuti. Preciznost izvođenja određenih radnji ( skretanja ) može biti različita jer ovisi o stanju napunjenosti baterija.
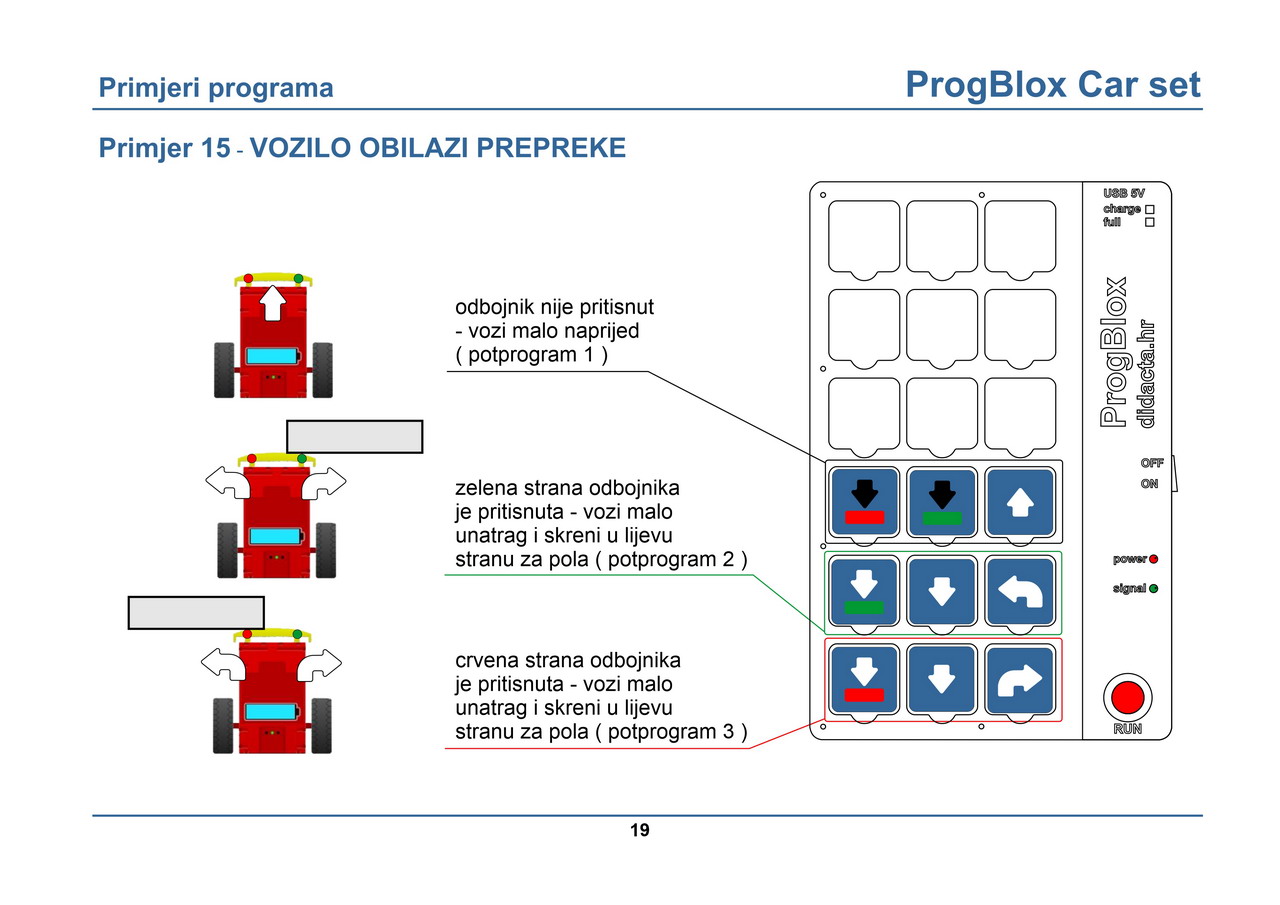
Primjer 15 - robotsko vozilo obilazi prepreke
Svaki puta kada robotsko vozilo dodirne prepreku crvenom ili zelenom stranom odbojnika robotsko vozilo se vrati unatrag i skreće u stranu ovisno o strani koja je pritisnuta. Kada odbojnik nije pritisnut robotsko vozilo se kreće prema naprijed. Još nedostaje potprogram za situaciju kada su obe strane odbojnika pritisnute.
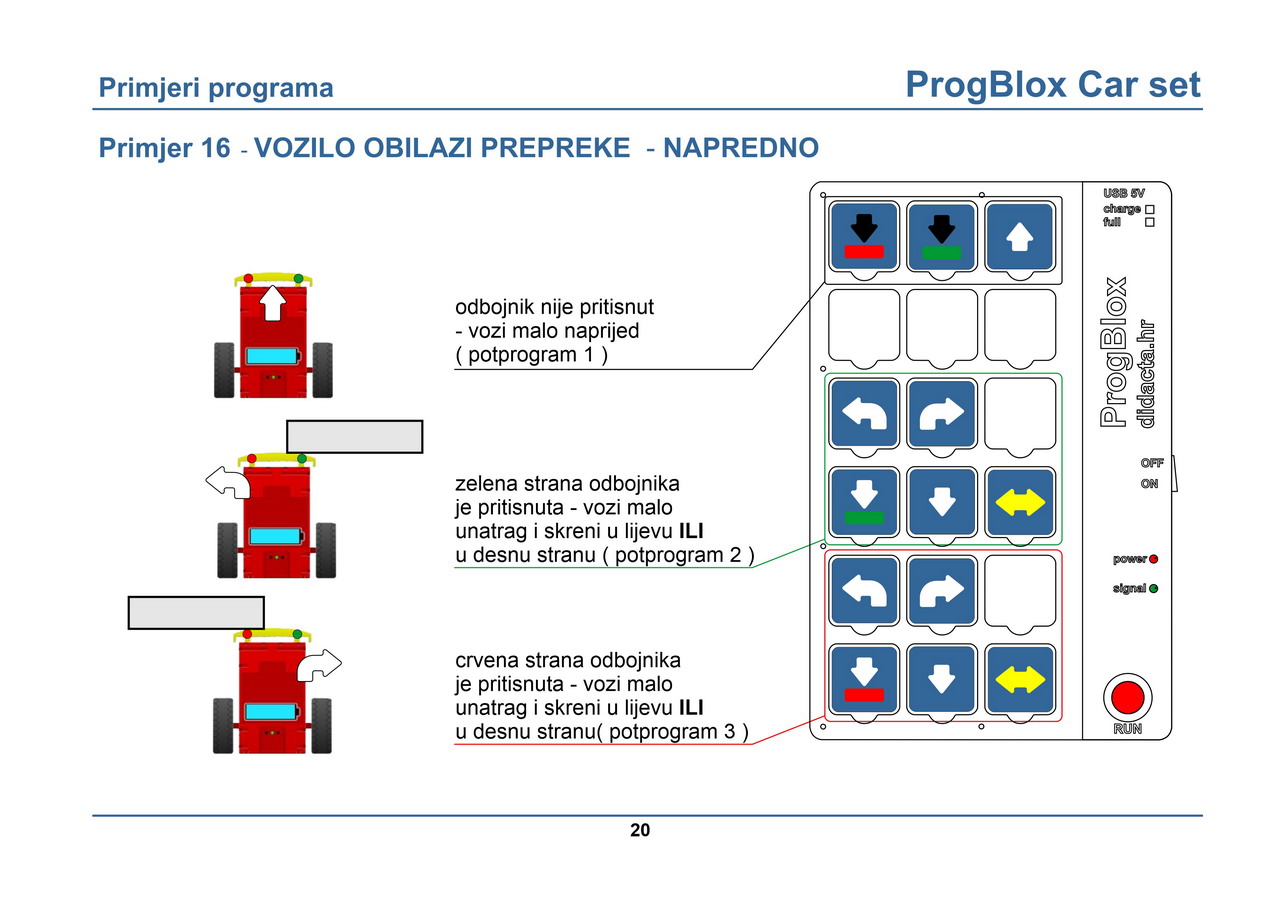
Primjer 16 - robotsko vozilo obilazi prepreke - NAPREDNO
Svaki puta kada robotsko vozilo dodirne prepreku crvenom ili zelenom stranom odbojnika robotsko vozilo se vrati unatrag i skreće u stranu ovisno o strani koja je pritisnuta. Dodavanjem naredbenih kockica "ODLUKE", vozilo će samo odlučivati o strani skretanja. Kada odbojnik nije pritisnut robotsko vozilo se kreće prema naprijed. Još nedostaje potprogram za situaciju kada su obe strane odbojnika pritisnute.
Primjer 17 - OČI robotskog vozila - žuto oko
Robotsko vozilo ima dva IR senzora, sa doljnje strane, koja zovemo OČI. Ima PLAVO i ŽUTO oko. Te oči prepoznaju da li je površina ispod robotskog vozila tamna ili svijetla. Ovaj primjer pokazuje jednostavnu kontrolu ŽUTOG oka. Kada je žuto oko iznad bijele ( svjetle ) površine upalit će se žuto LED svijetlo, a kada je iznad crne ( tamne ) površine, svjetlo će se ugasiti.
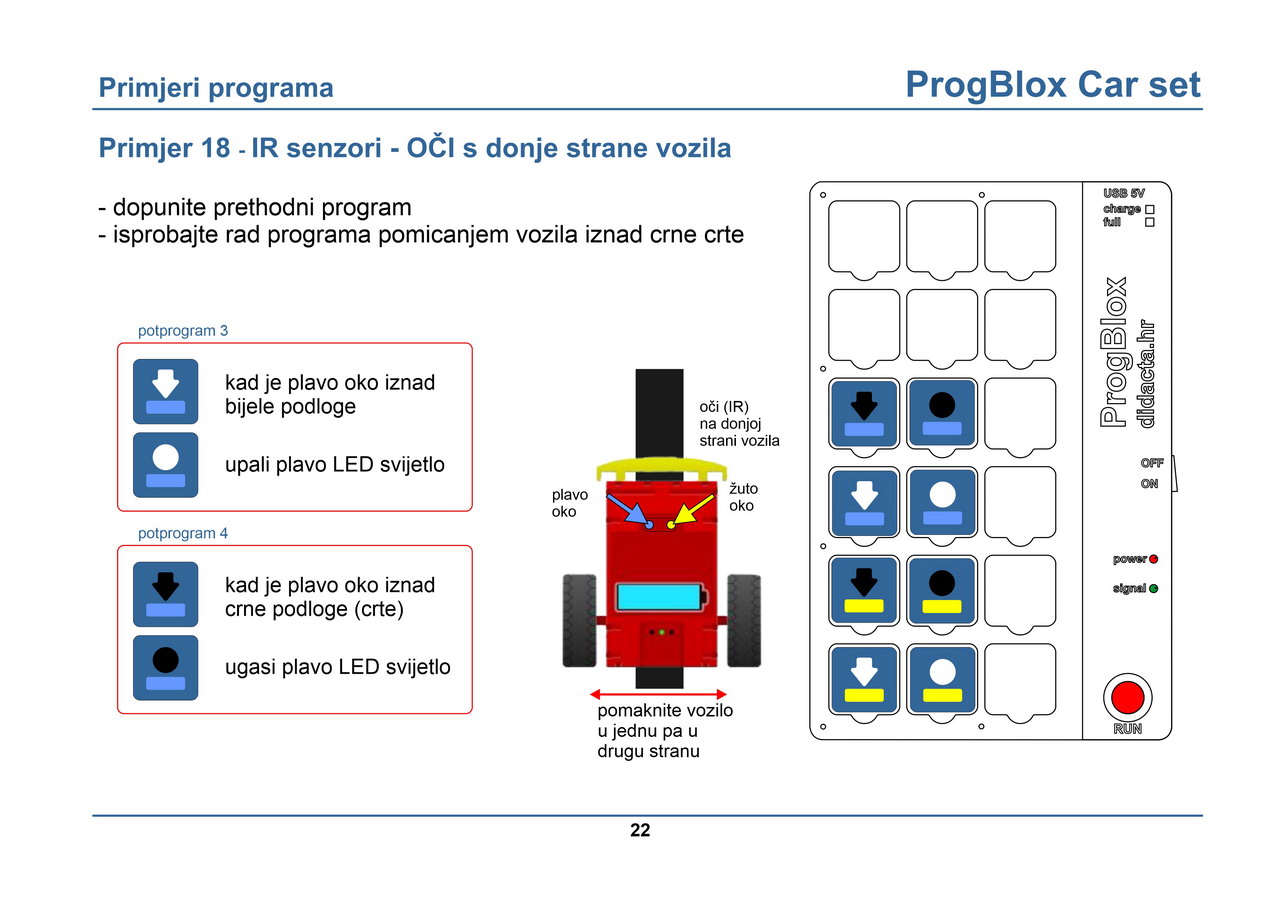
Primjer 18 - OČI robotskog vozila
Robotsko vozilo ima dva IR senzora, sa doljnje strane, koja zovemo OČI. Ima PLAVO i ŽUTO oko. Te oči prepoznaju da li je površina ispod robotskog vozila tamna ili svijetla. Ovaj primjer pokazuje jednostavnu kontrolu ŽUTOG oka i PLAVOG oka. Kada je žuto oko iznad bijele ( svjetle ) površine upalit će se žuto LED svijetlo, a kada je iznad crne ( tamne ) površine, žuto svjetlo će se ugasiti. Kada je plavo oko iznad bijele ( svjetle ) površine upalit će se plavo LED svijetlo, a kada je iznad crne ( tamne ) površine, plavo svjetlo će se ugasiti.
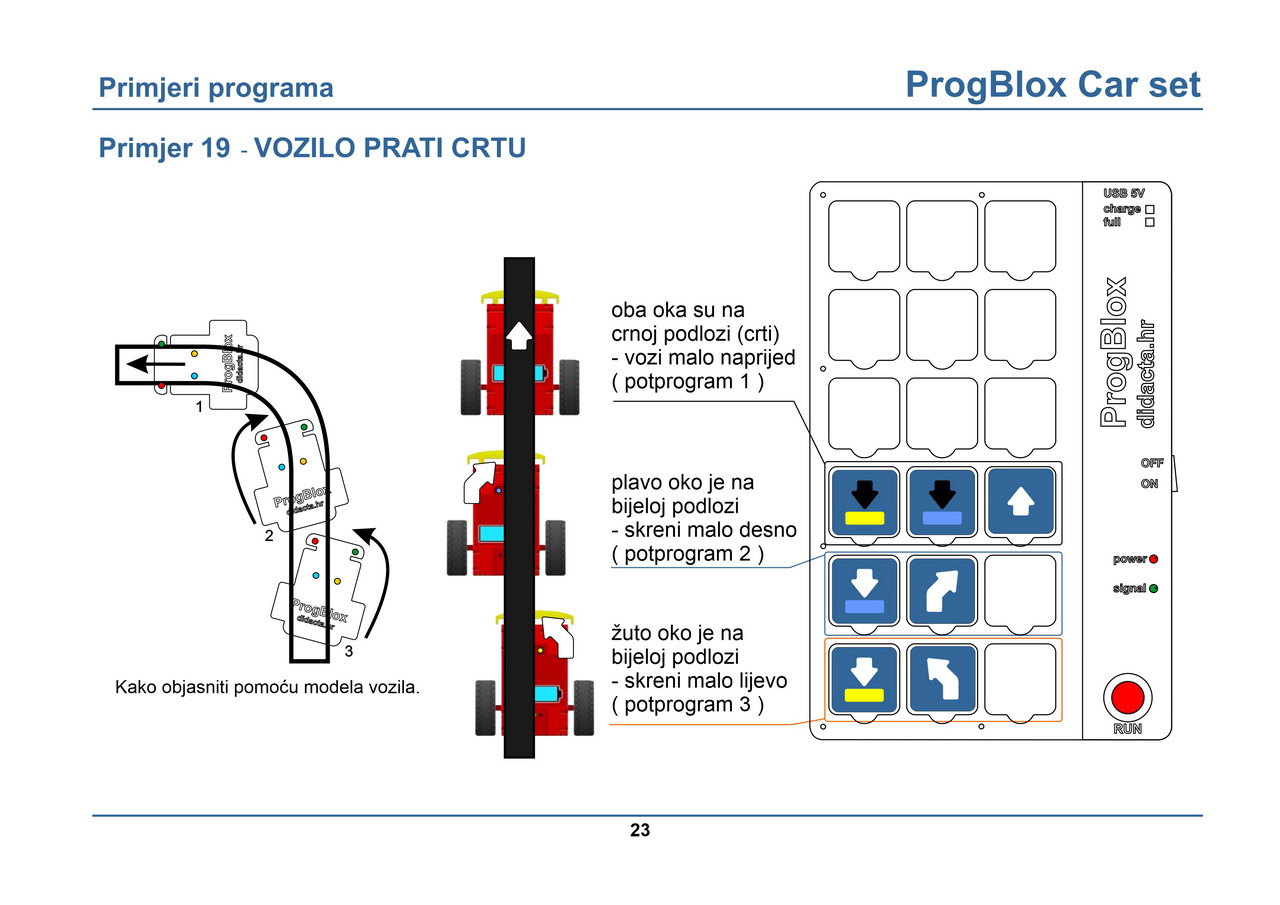
Primjer 19 - OČI - robotsko vozilo prati crtu
Putem OČIJU kontroliramo položaj vozila iznad crne crte. Da bi se vozilo kretalo po crti treba stalno ispravljati svoj položaj, osim kada je sa oba oka iznad crte. Kada su oba oka iznad crte vozilo se kreće prema naprijed. Kada se žuto oko nađe iznad bijele podloge robotsko vozilo treba malo skrenuti u suprotnu stranu ( lijevu ) i vratiti robotsko vozilo na crtu. Isto se položaj robotskog vozila ispravlja kad je plavo oko iznad bijele površine, treba malo krenuti u supotnu stranu ( desnu ) i vratiti robotsko vozilo na crtu.
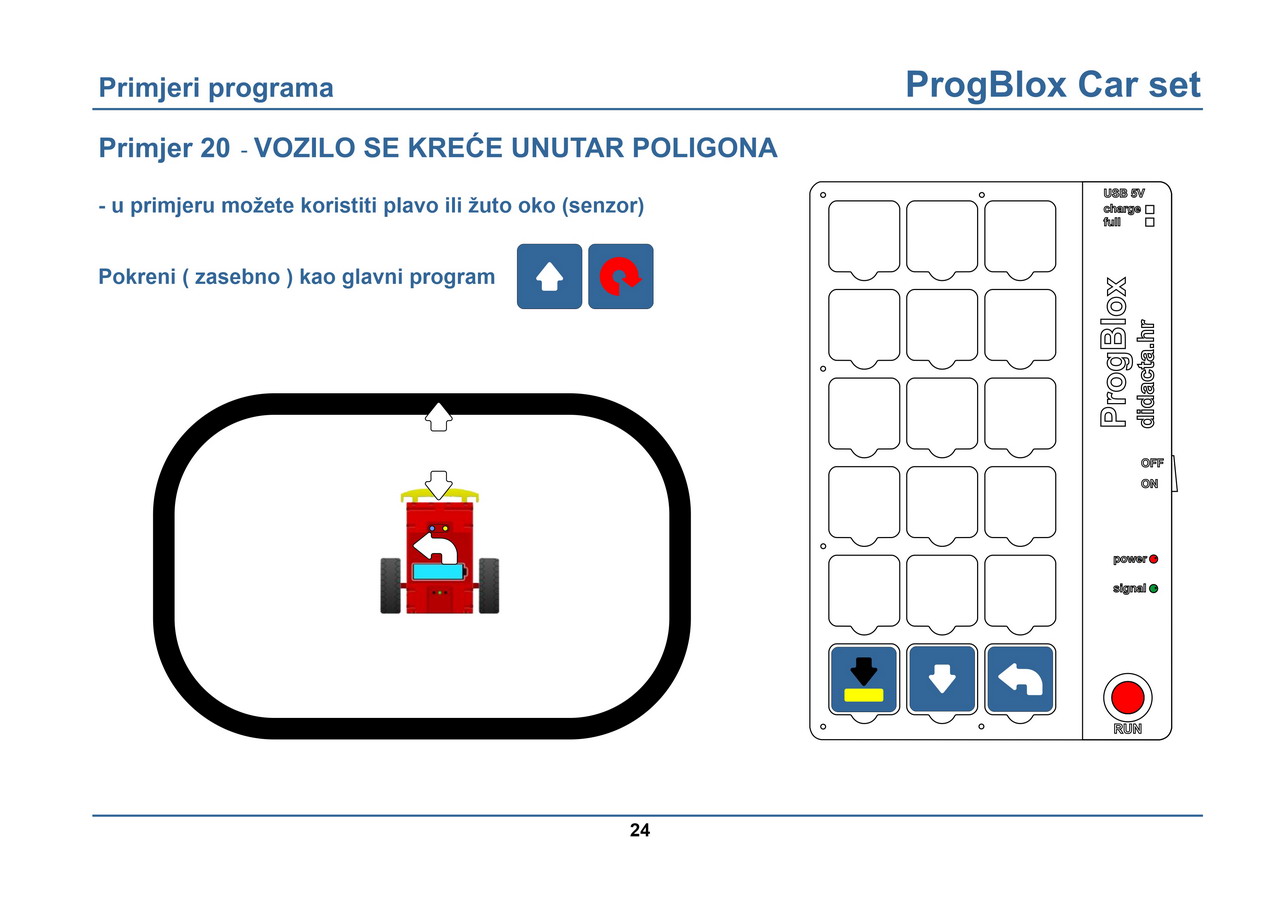
Primjer 20 - OČI - robotsko vozilo u poligonu
Uz pomoć jednog oka ( žutog ili plavog ) možemo robotska kolica zatvoriti unutar poligona. Putem glavnog programa vozilo se beskonačno kreće prema naprijed. Svaki puta kada žuto oko pronađe crnu ( tamnu ) površinu, robotsko vozilo vraća se unatrag i skreće u lijevu stranu.
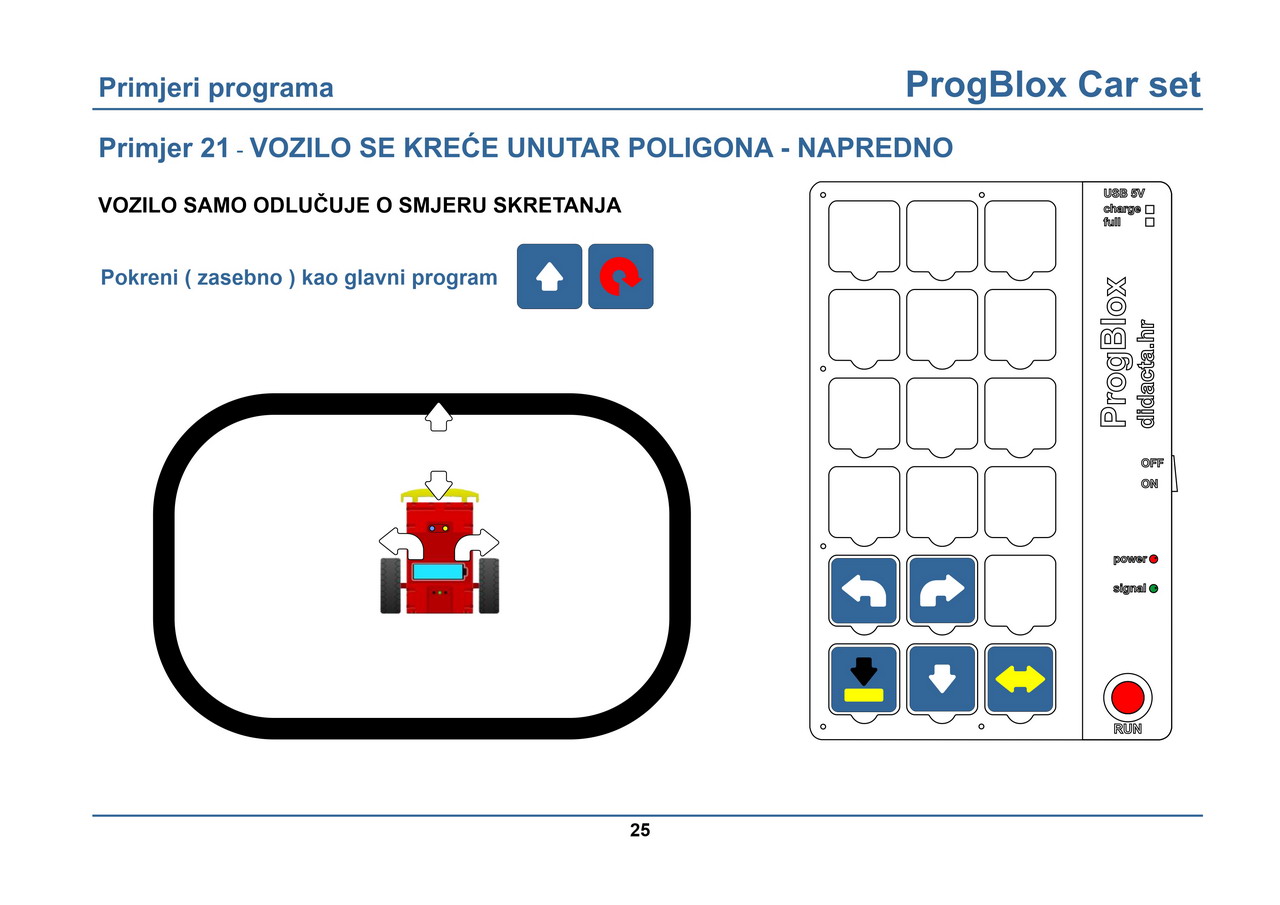
Primjer 21 - OČI - robotsko vozilo u poligonu - NAPREDNO
Uz pomoć jednog oka ( žutog ili plavog ) možemo robotska kolica zatvoriti unutar poligona. Putem glavnog programa vozilo se beskonačno kreće prema naprijed. Svaki puta kada žuto oko pronađe crnu ( tamnu ) površinu, robotsko vozilo vraća se unatrag i skreće u stranu koju samo odabere putem naredbene kockice "ODLUKE".