

| ŠKOLA PROGRAMIRANJA | RoboPro Coding - TXT 4.0 |
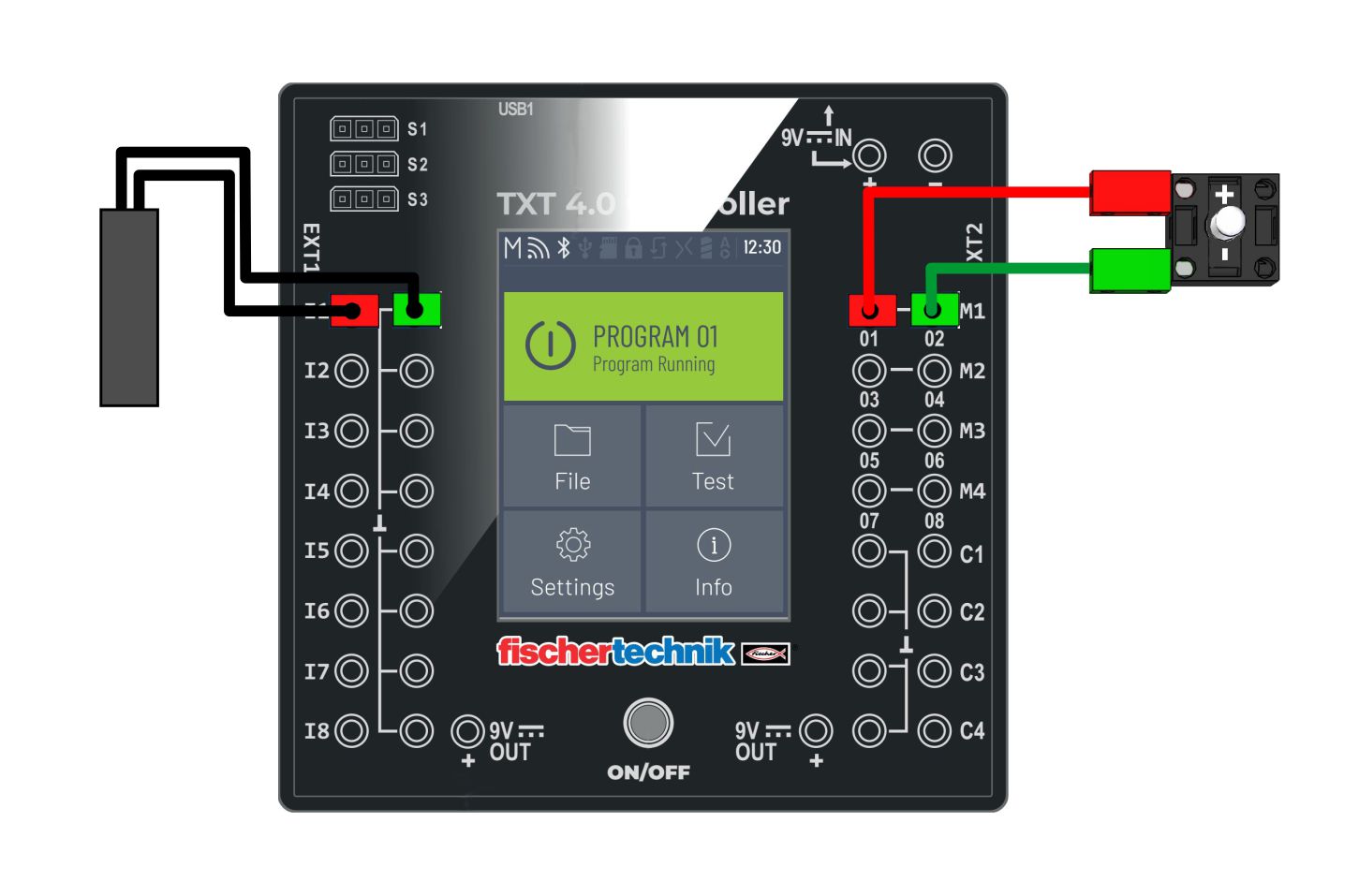
| 1. | Upali LED digitalno | 9. | KOLOR senzor | ||||||
| 2. | Kontrola LED diode analogno | 10. | MAGNETSKI senzor | ||||||
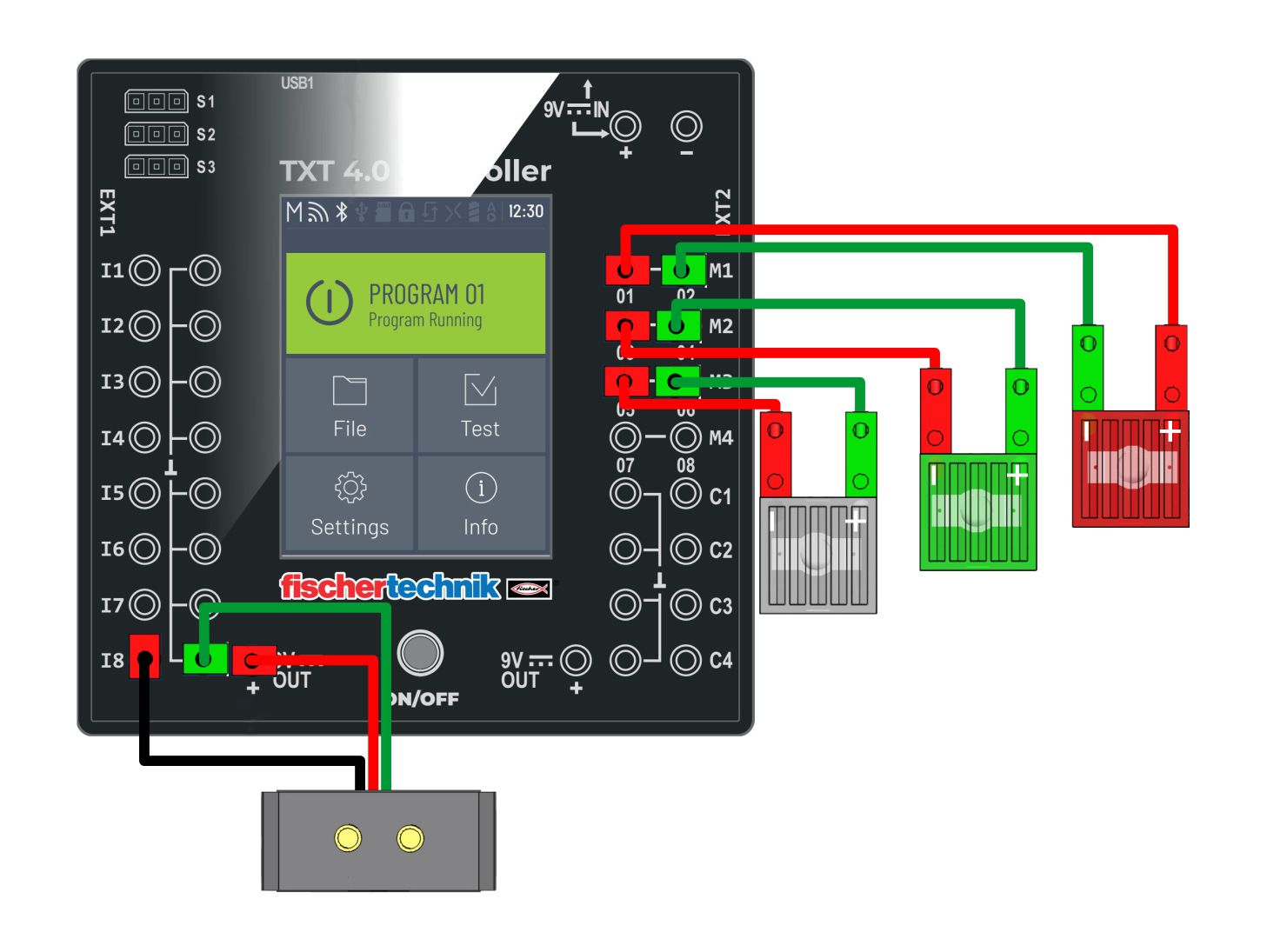
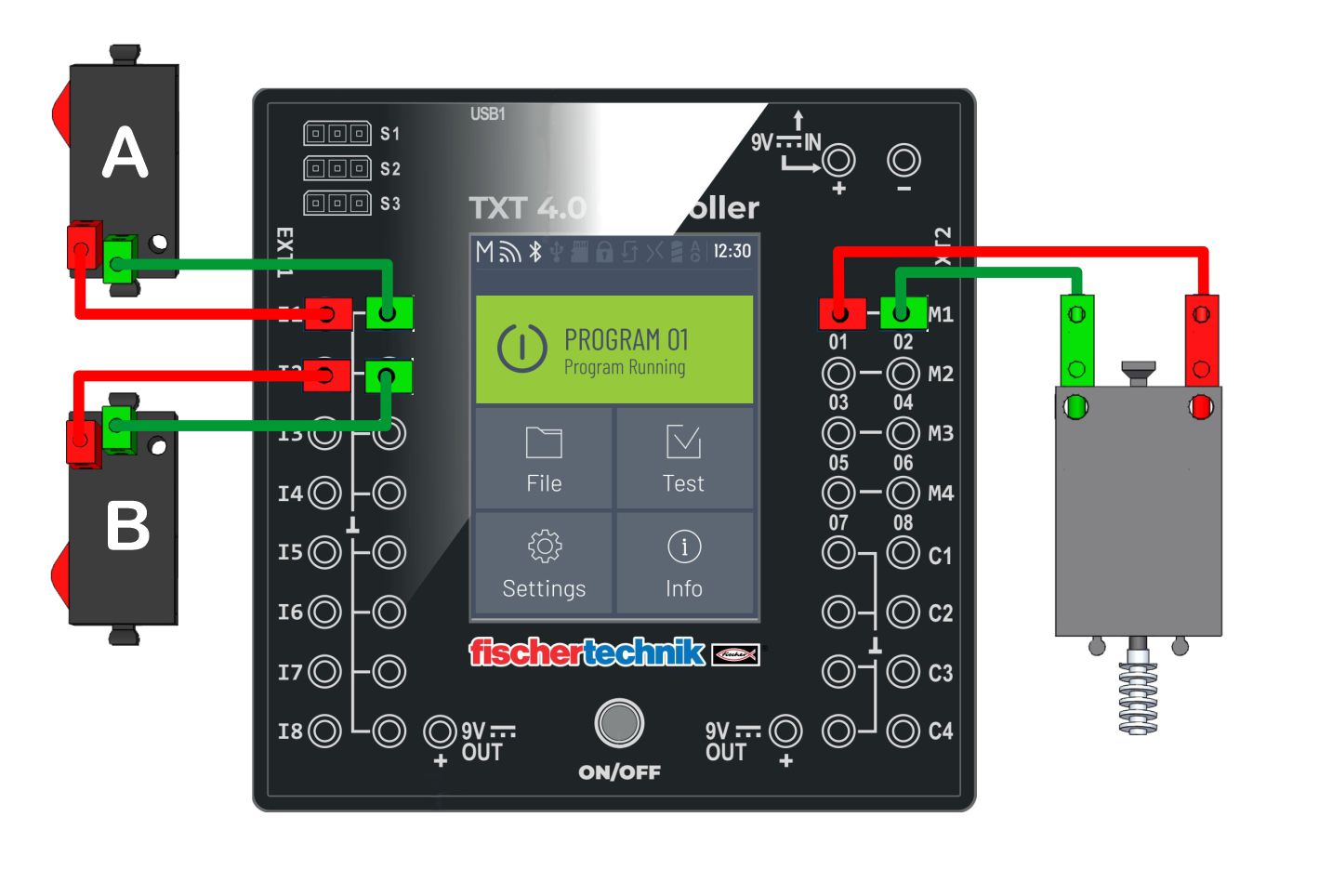
| 3. | Pali LED putem prekidaća | 11. | MOTOR kontrola prekidaćima | ||||||
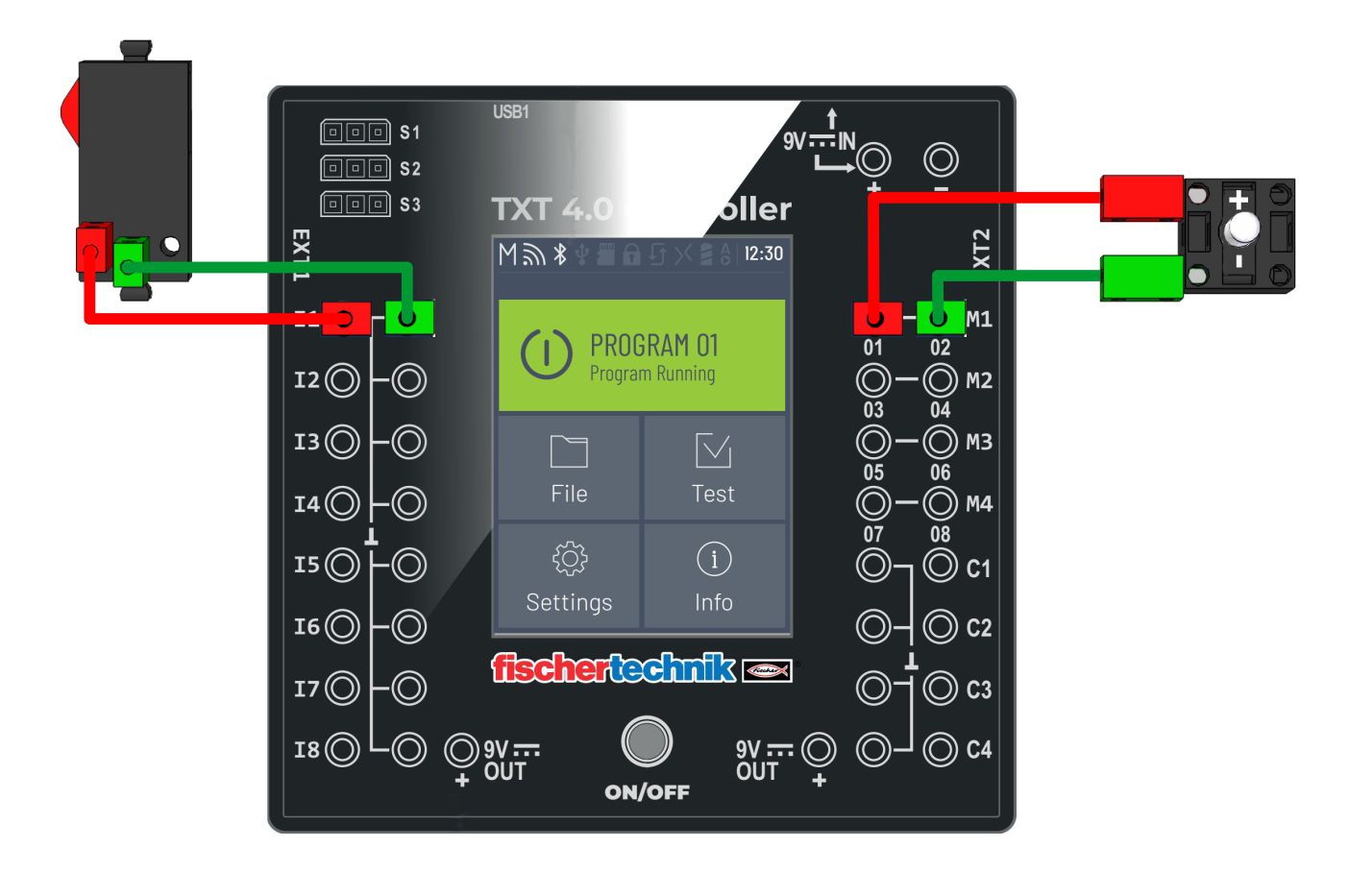
| 4. | FOTO tranzistor | 12. | MOTOR kontrola brzine | ||||||
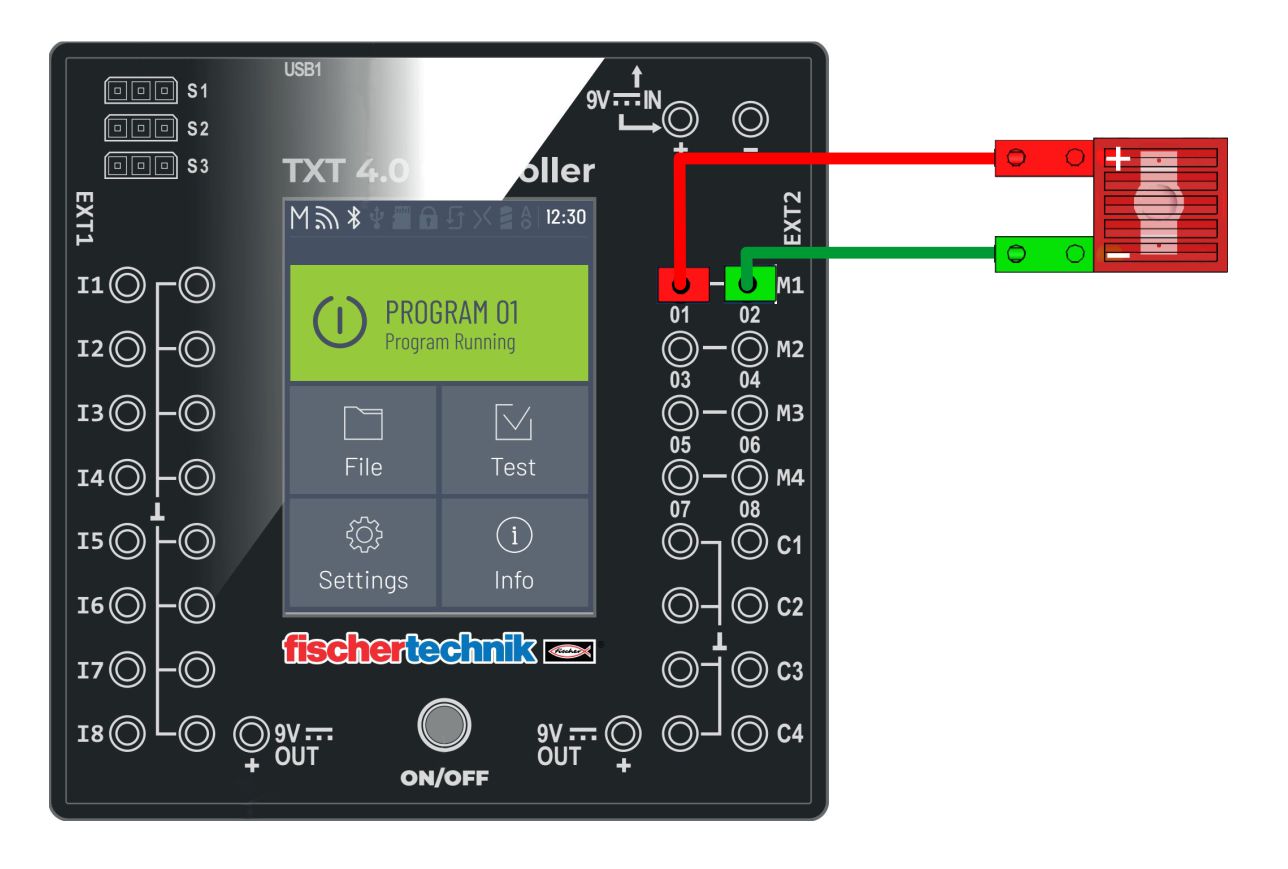
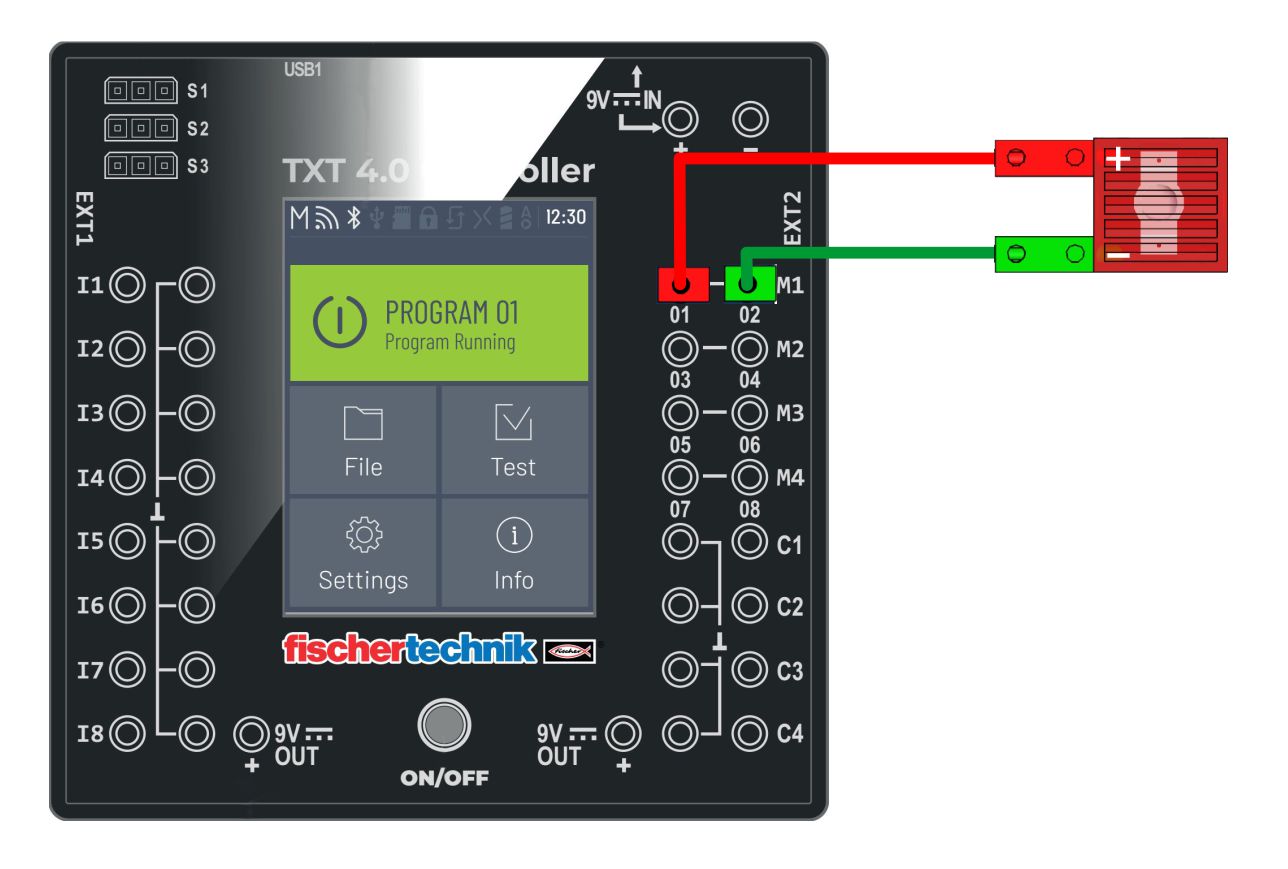
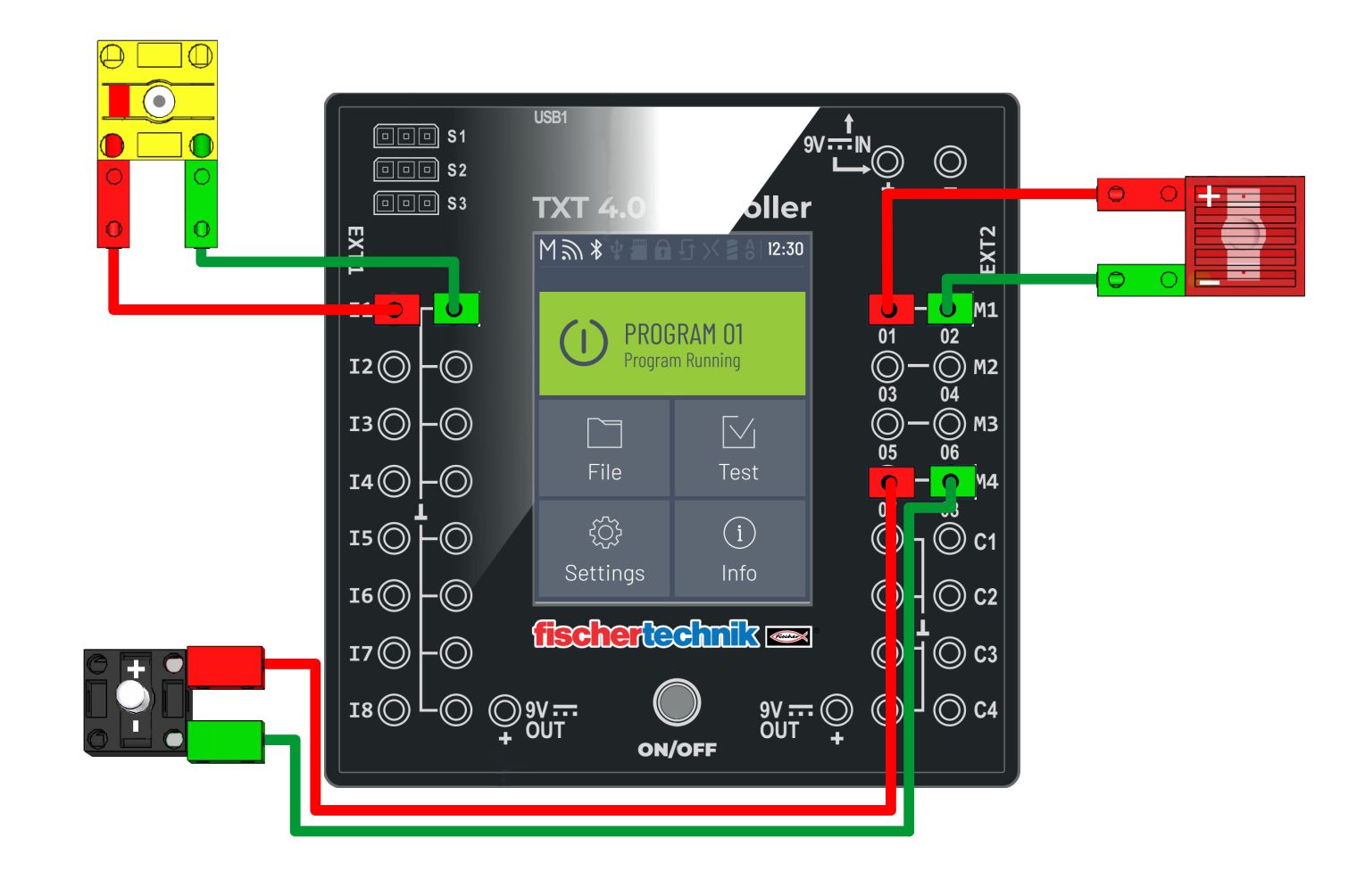
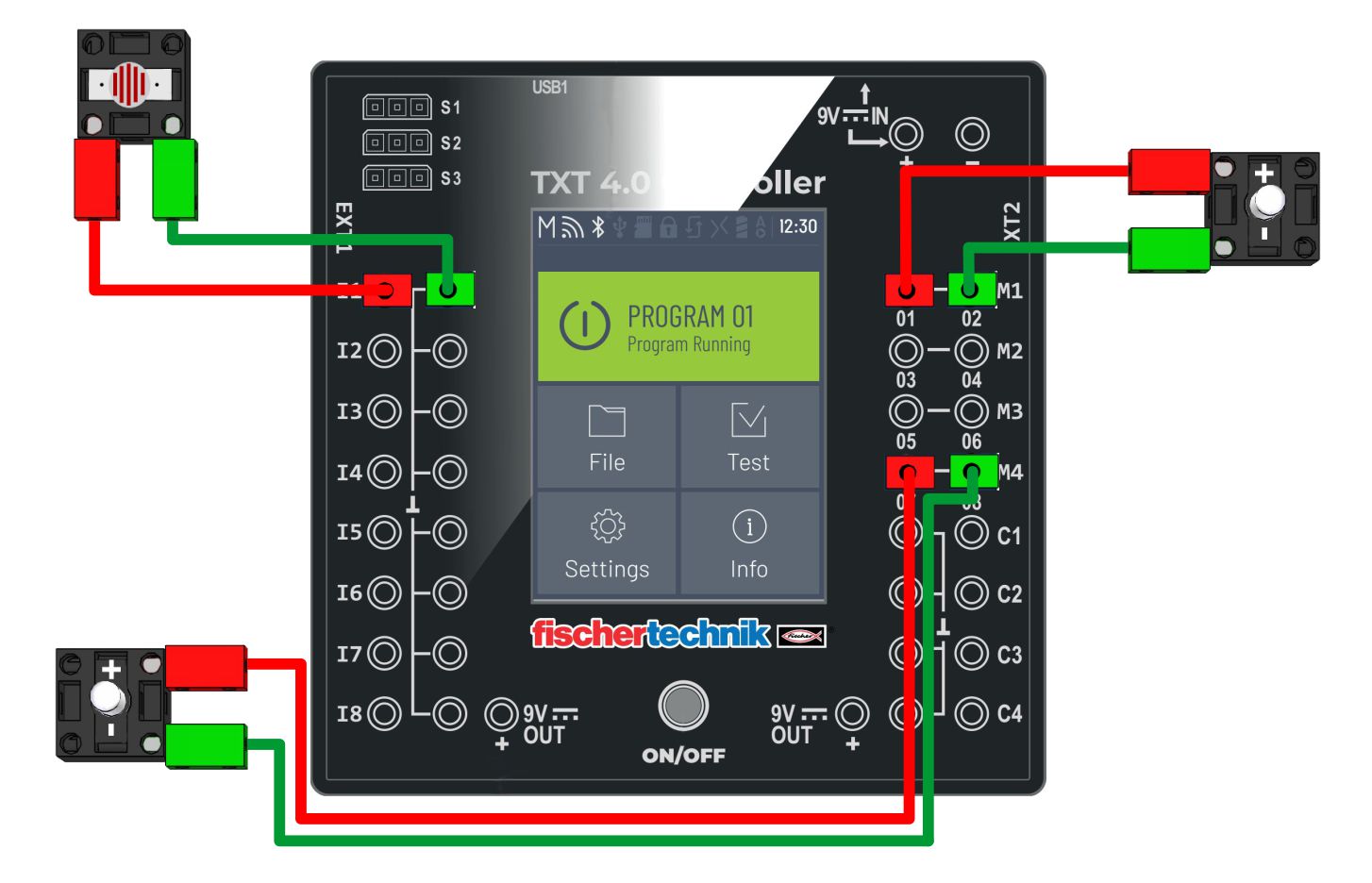
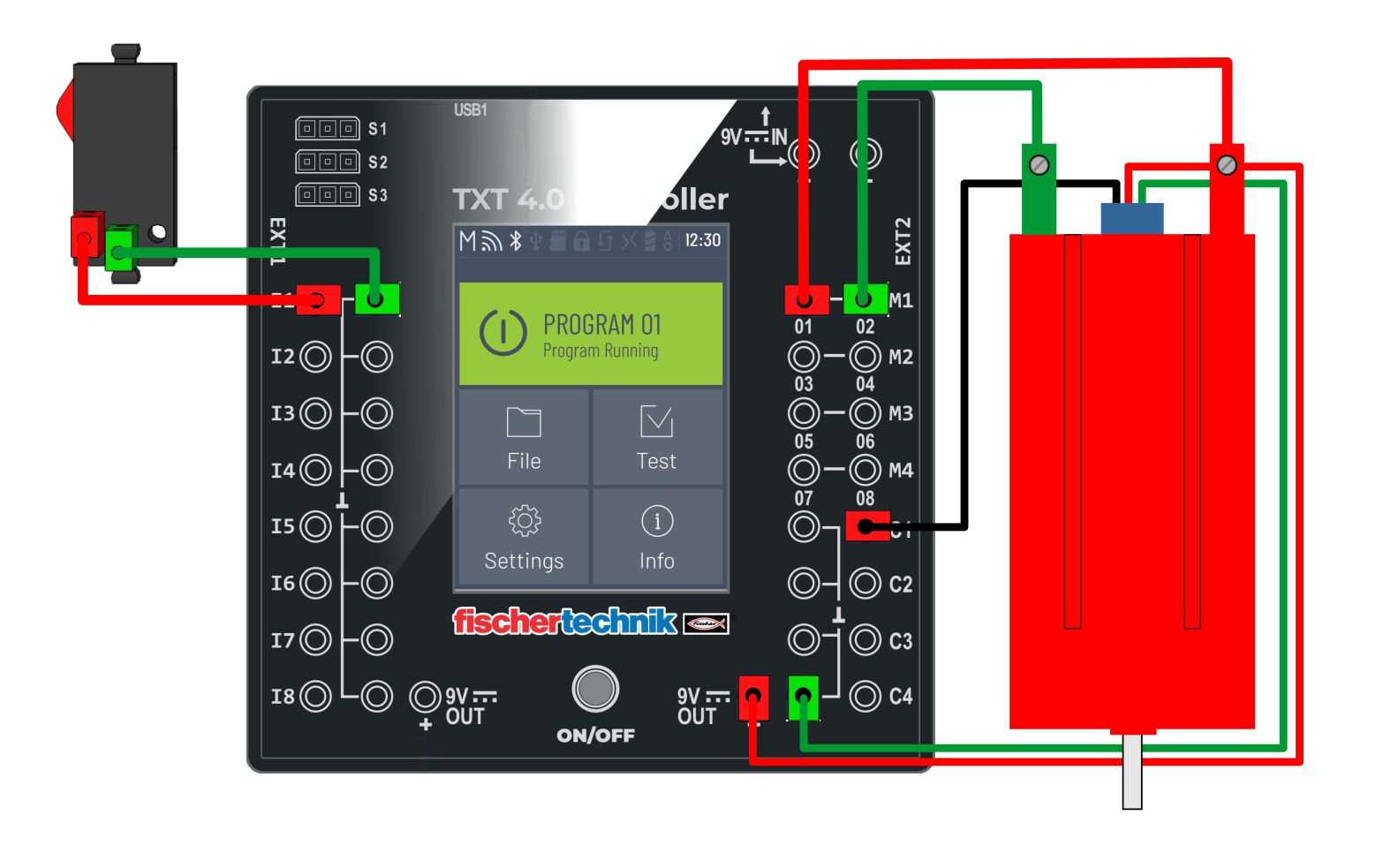
| 5. | FOTO otpornik (analogno) | 13. | MOTOR - impulsni zupčanik | ||||||
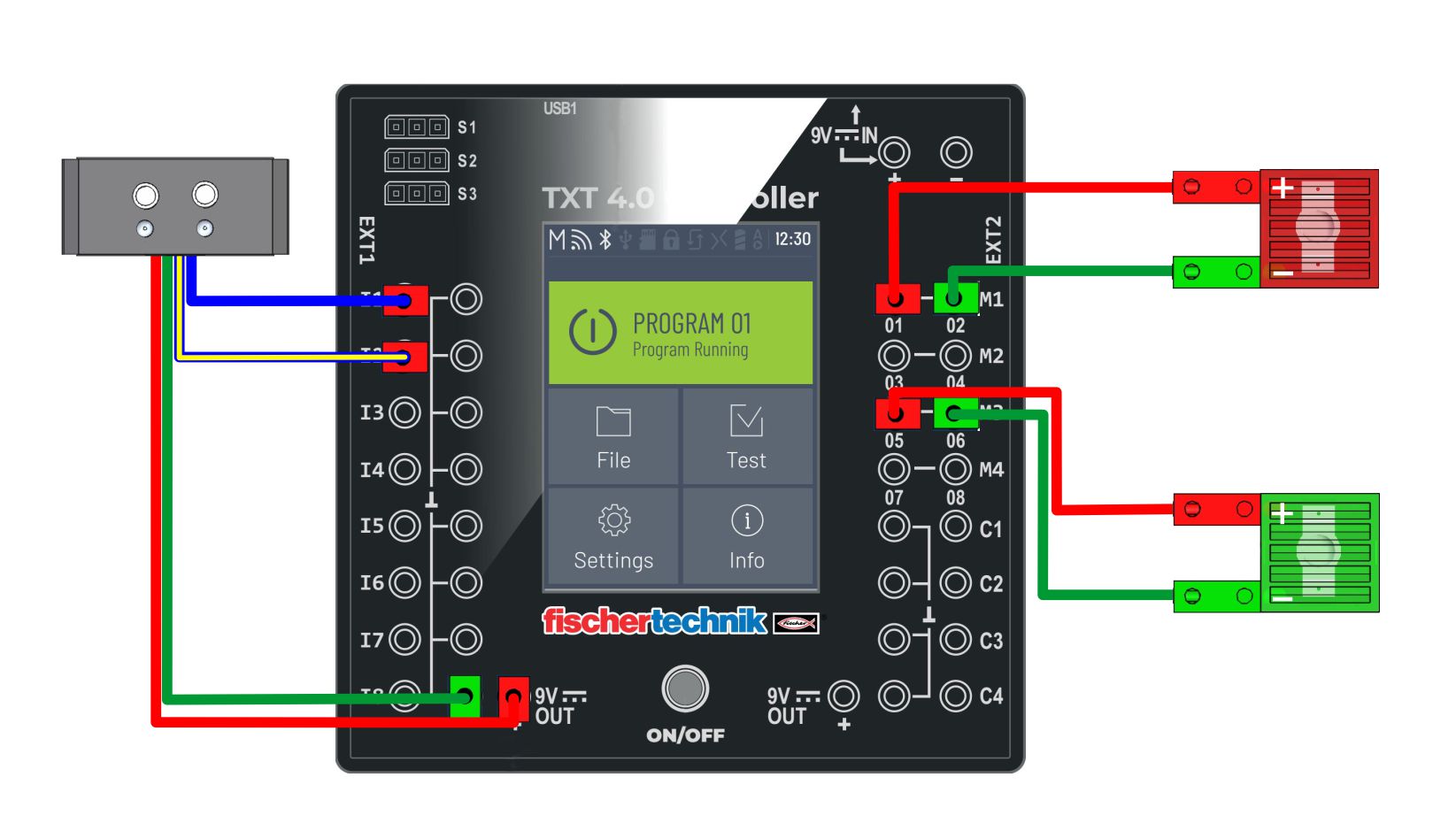
| 6. | IR senzor | 14. | ENKODER motor | ||||||
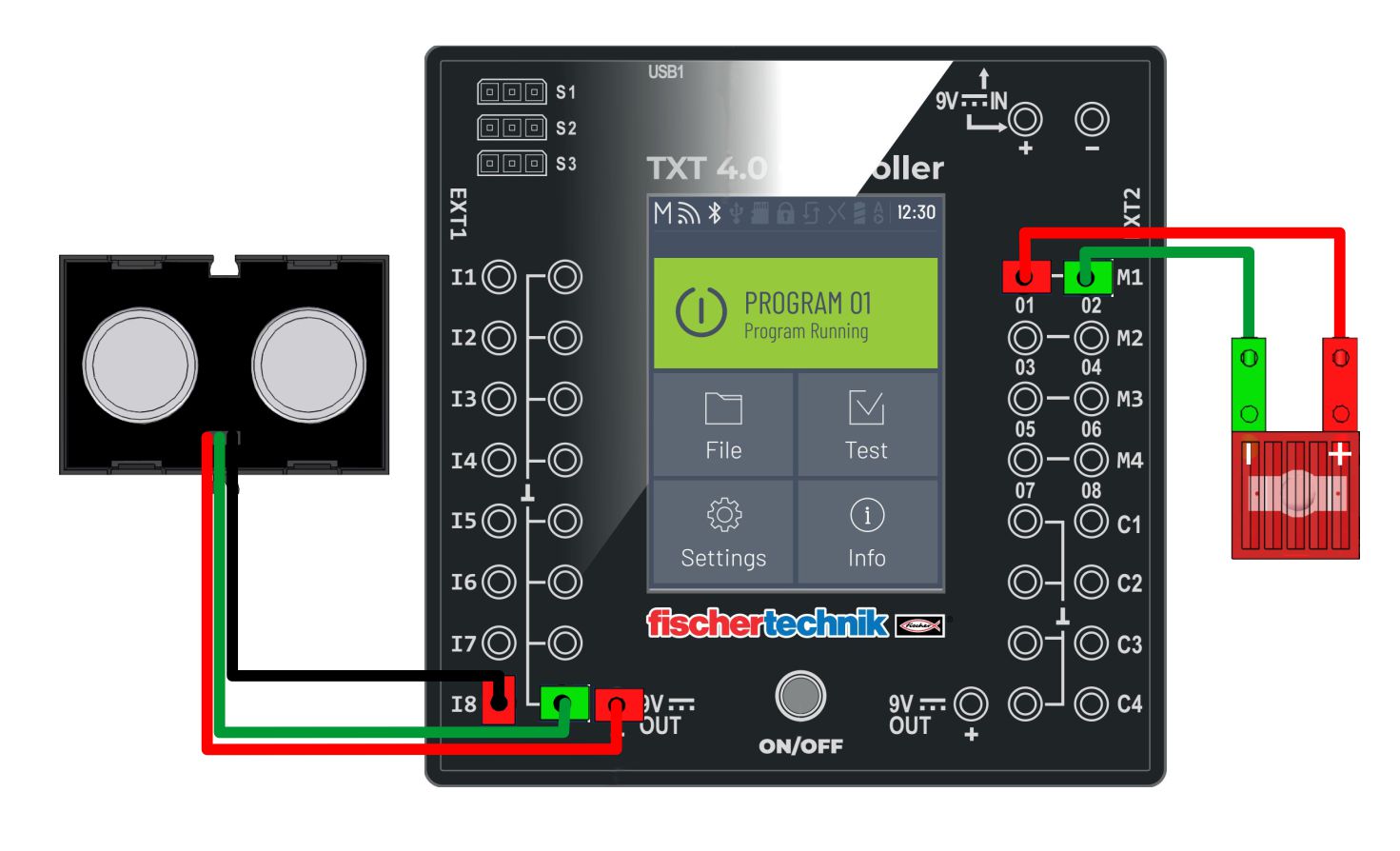
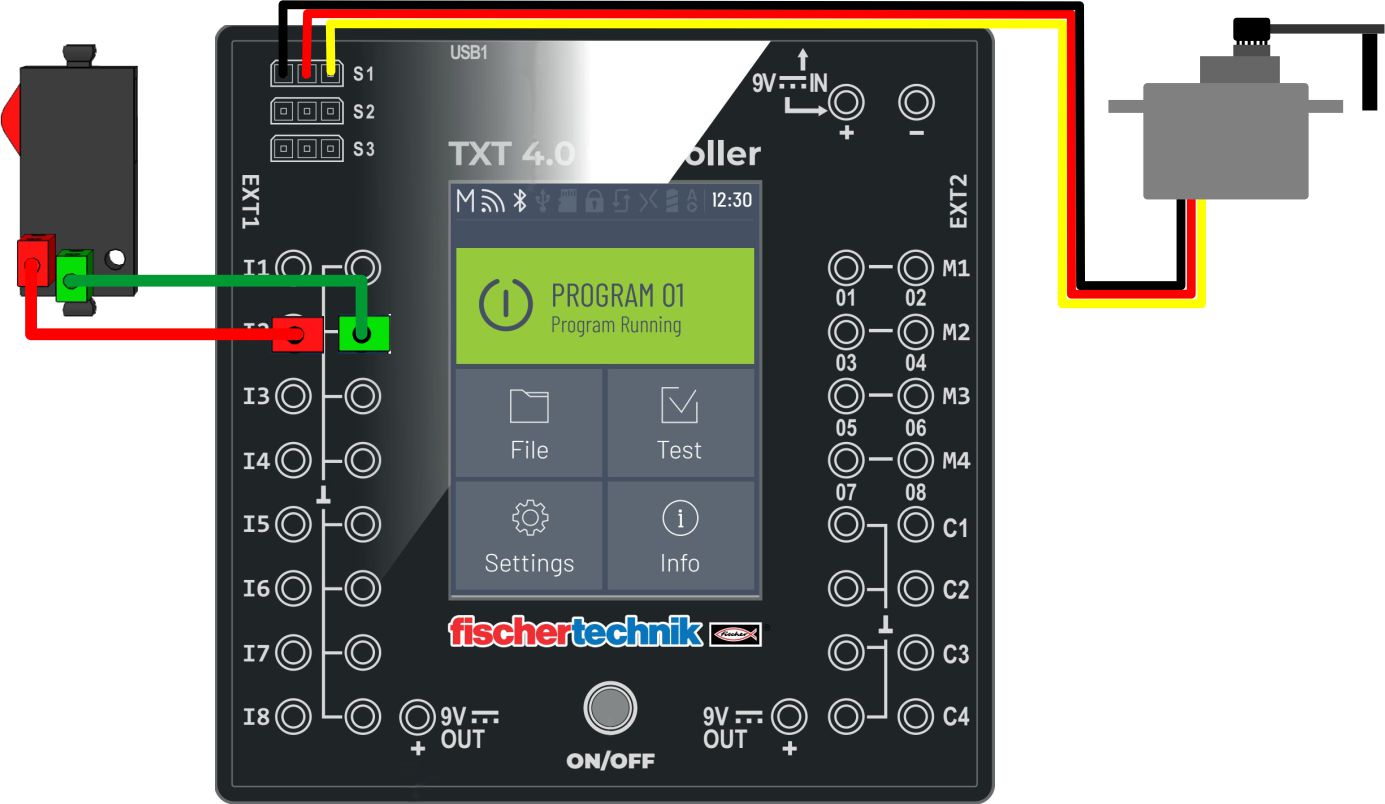
| 7. | ULTRAZVUČNI senzor (1.) | 15. | SERVO MOTOR | ||||||
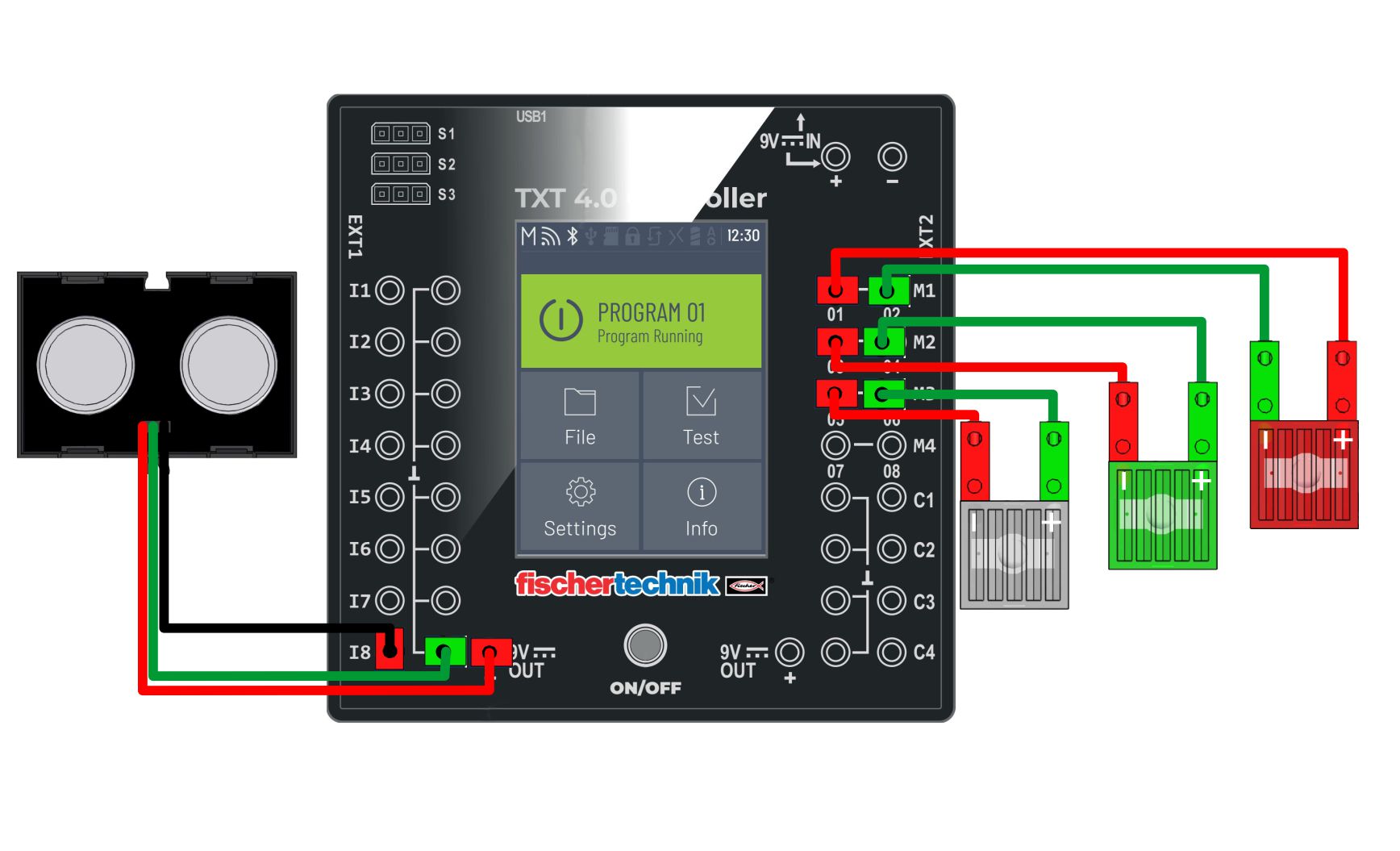
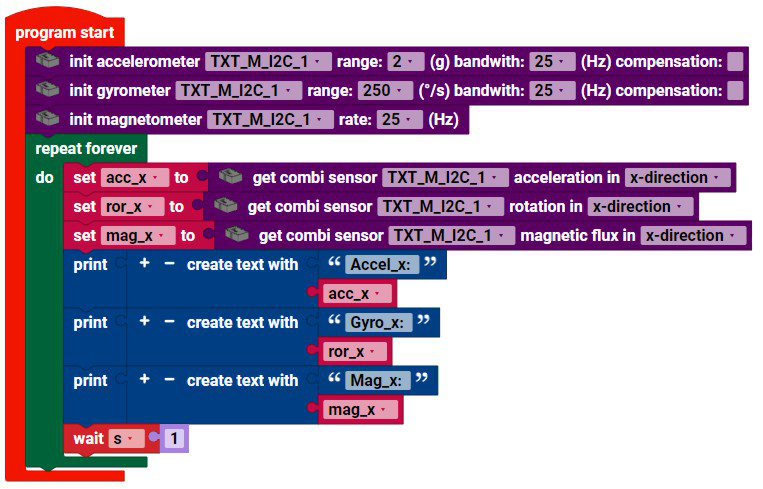
| 8. | ULTRAZVUČNI senzor (2.) | 16. | Kombi senzor 6 Pin | ||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
{kind=link}